






ESTC 2019, the Energy, Science, and Technology Conference[1], included a presentation and working demonstration by Eric Dollard on Tesla’s Colorado Springs experiment[2] (TCS), which is available through A & P Electronic Media[3,4]. Due to unforseen circumstances relating to the demonstration co-worker, the generator for this experiment was unavailable after the demonstration for additional experimentation, investigation, and follow-up demonstrations. In agreement with Eric Dollard I suggested that the spark gap generator from the Vril Science Multiwave Oscillator Product[5], (MWO), could be adapted, tuned, and applied to the Colorado Springs experiment, and in order to facilitate ongoing investigation and experimentation throughout the conference period. What follows in this post is the story of how this successful endeavour unfolded in the form of videos, pictures, measurements, and of course the final results.
The first video below shows highlights from the endeavour, video footage was recorded and supplied by Paul Fraser, and reproduced here with permission from A & P Electronic Media.
The second video below shows highlights from the impedance measurements part of the endeavour, video footage again by Paul Fraser, and by Raui Searle.
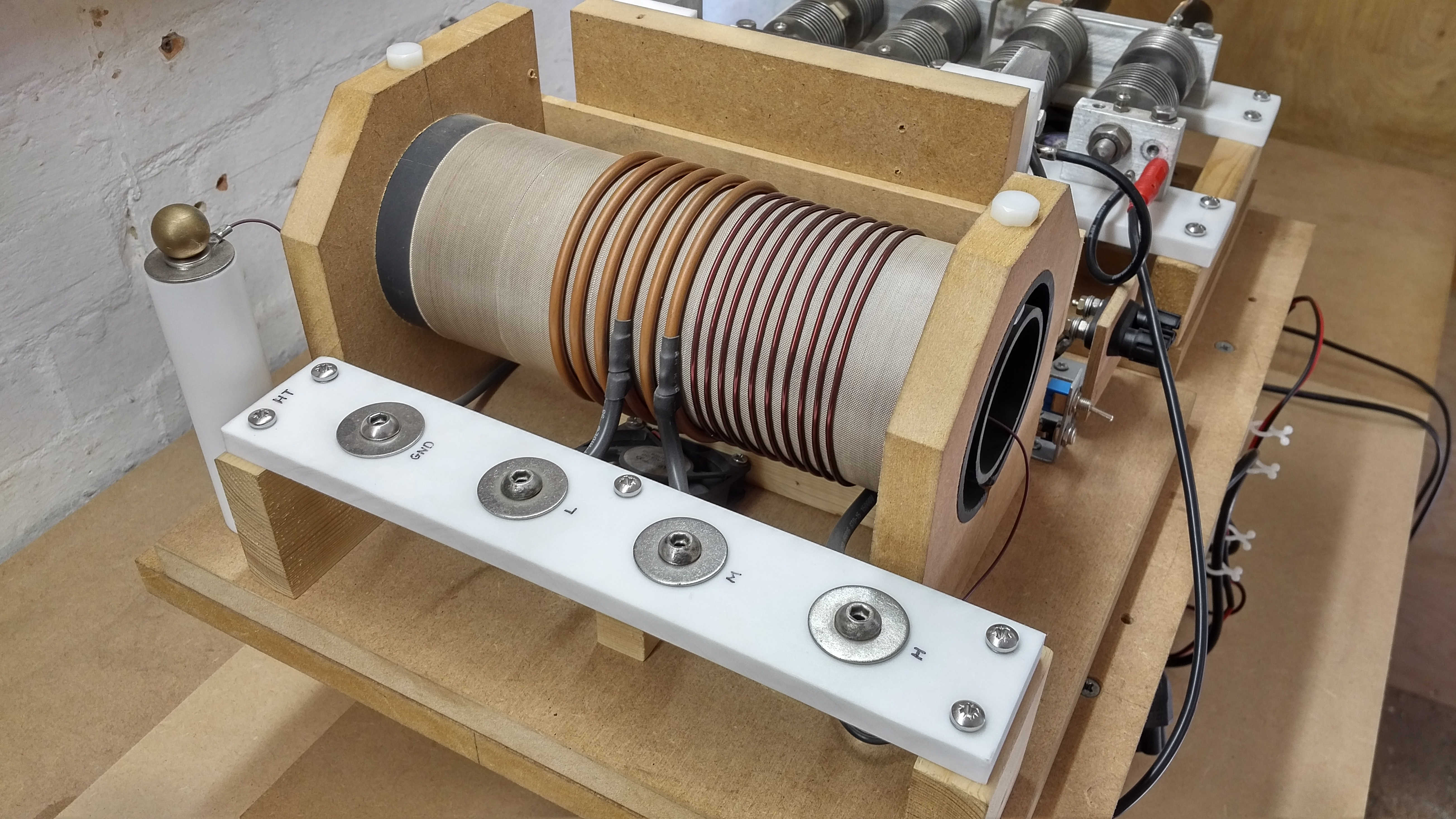
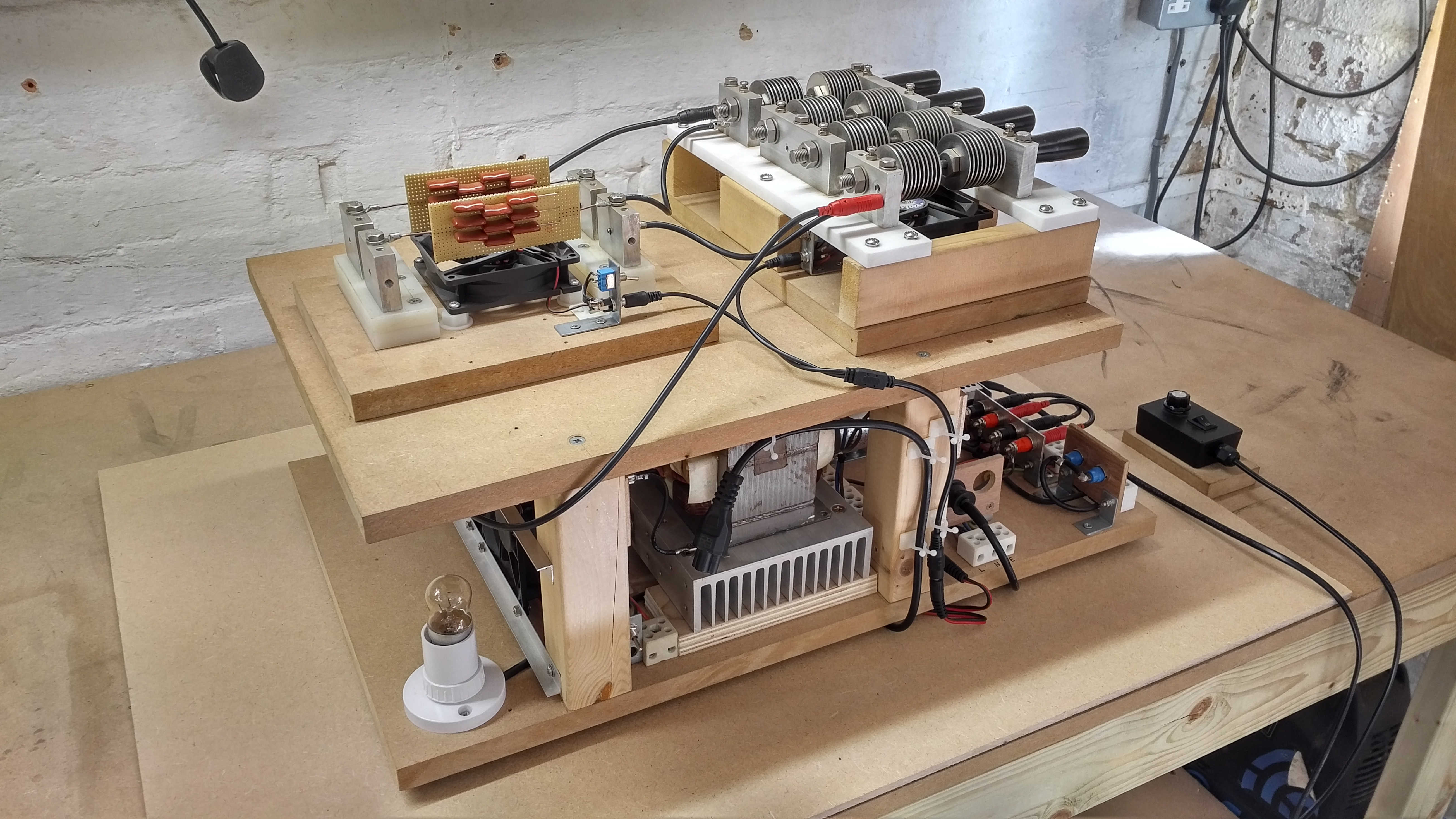
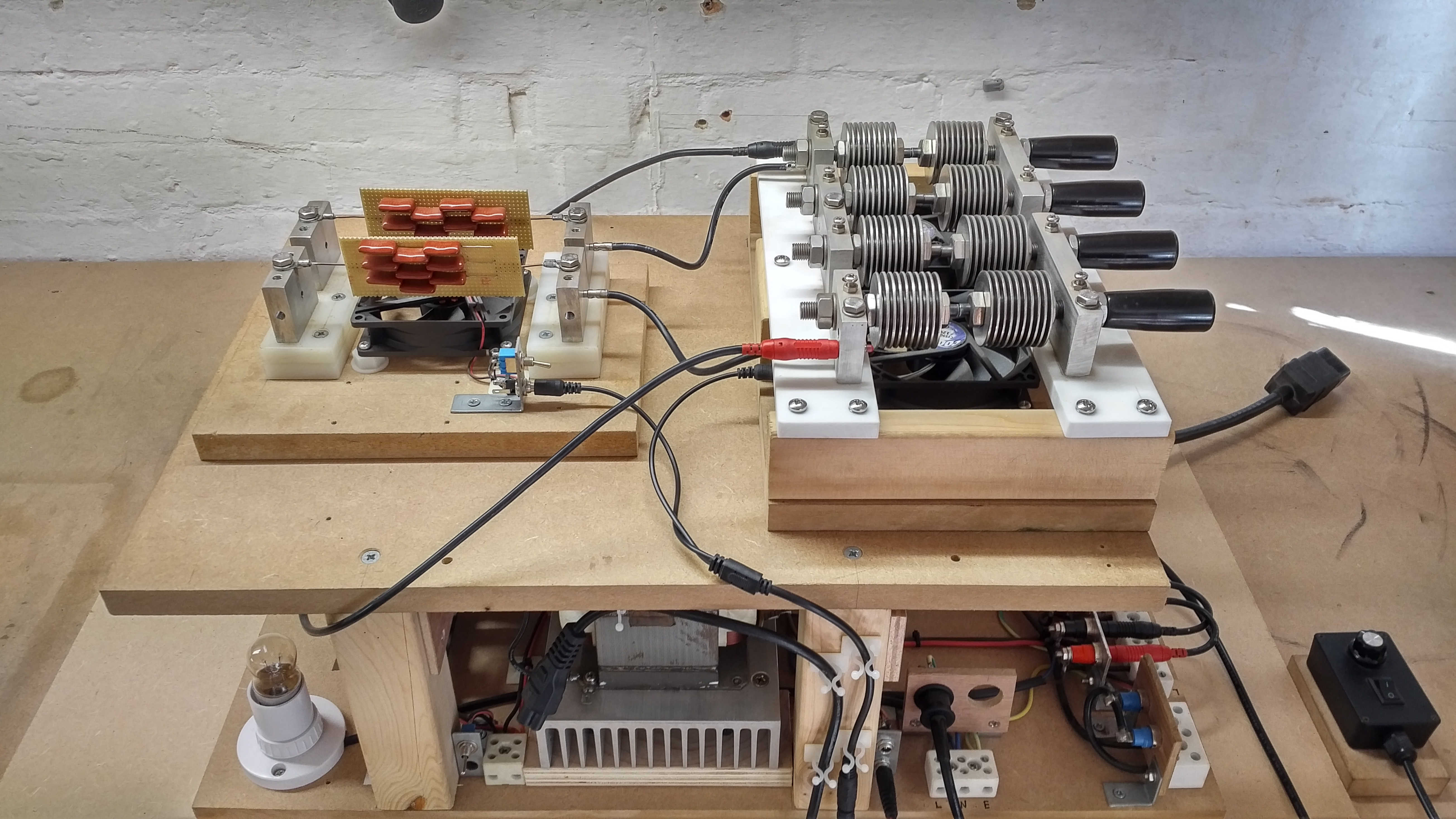
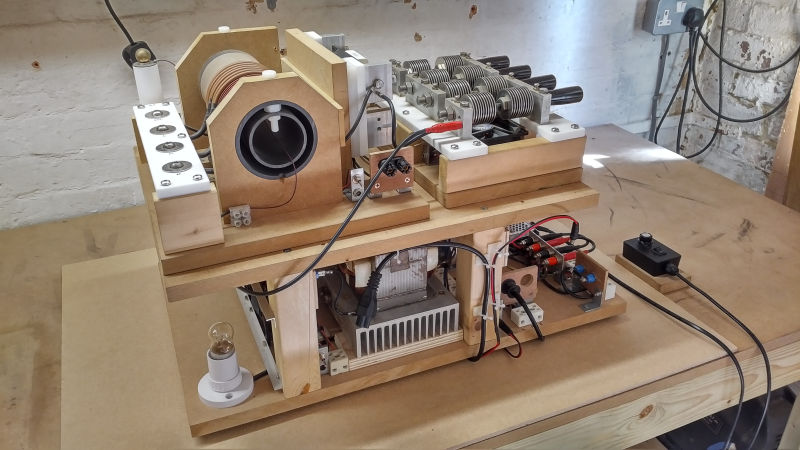
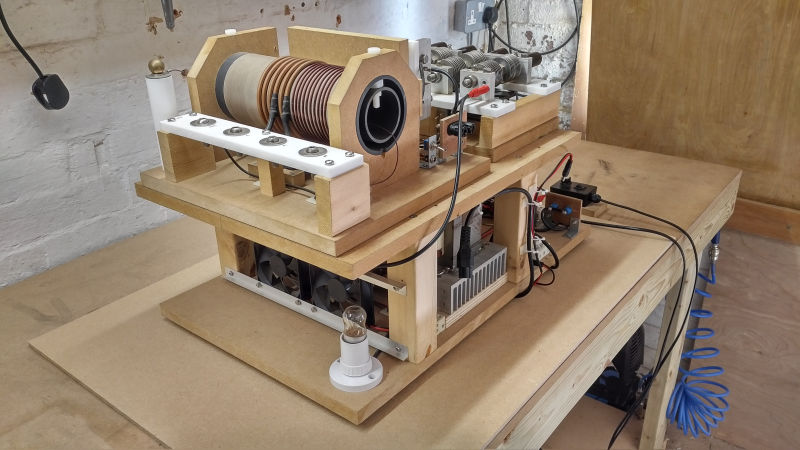
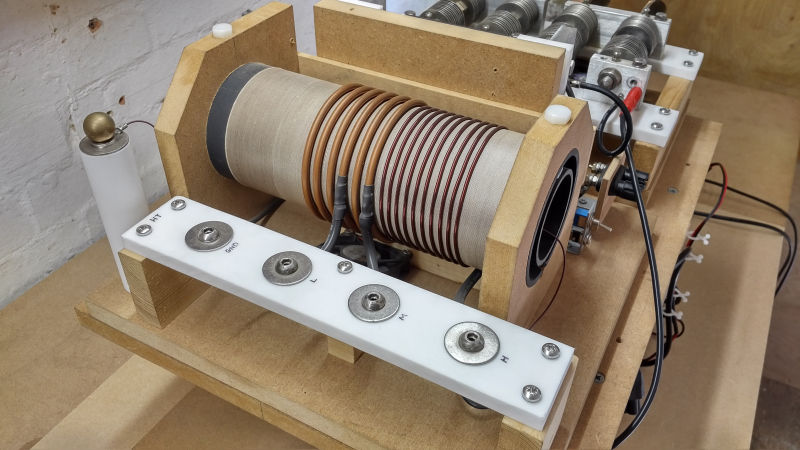
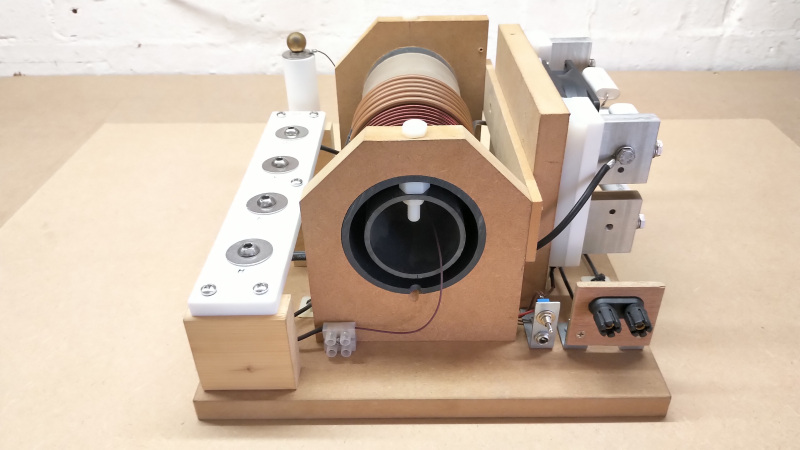
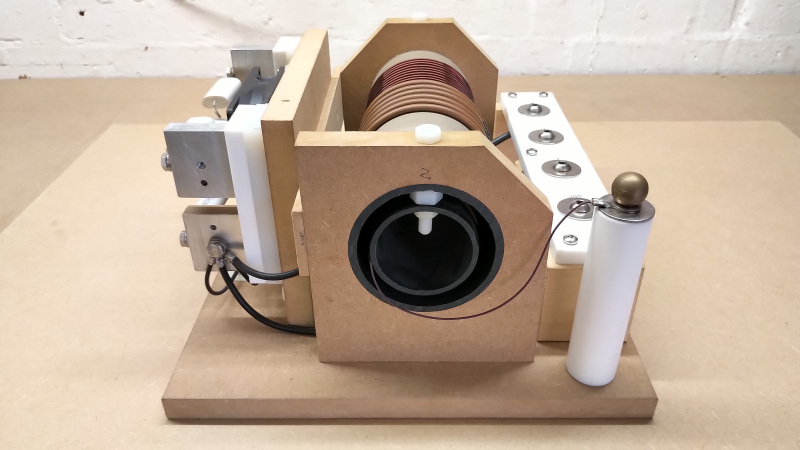
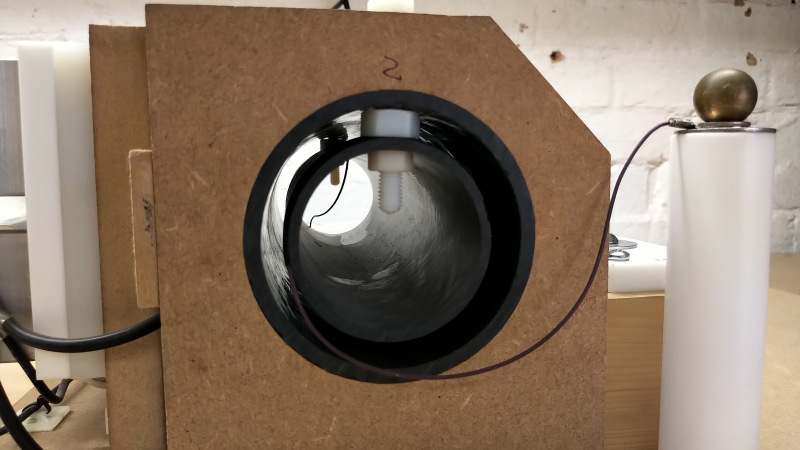
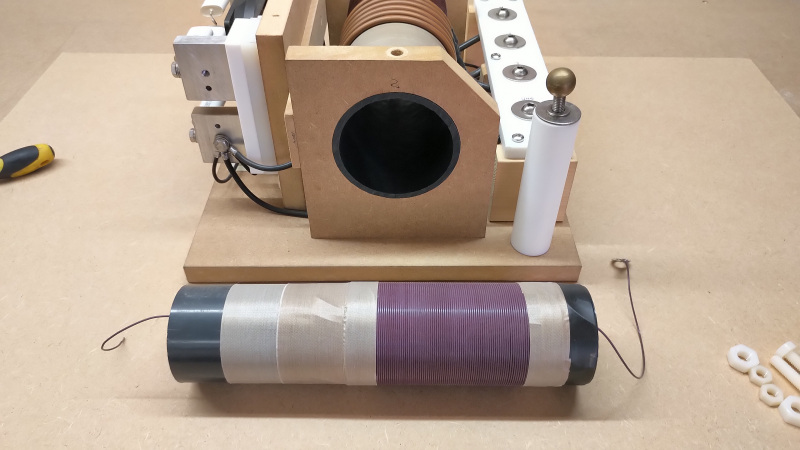
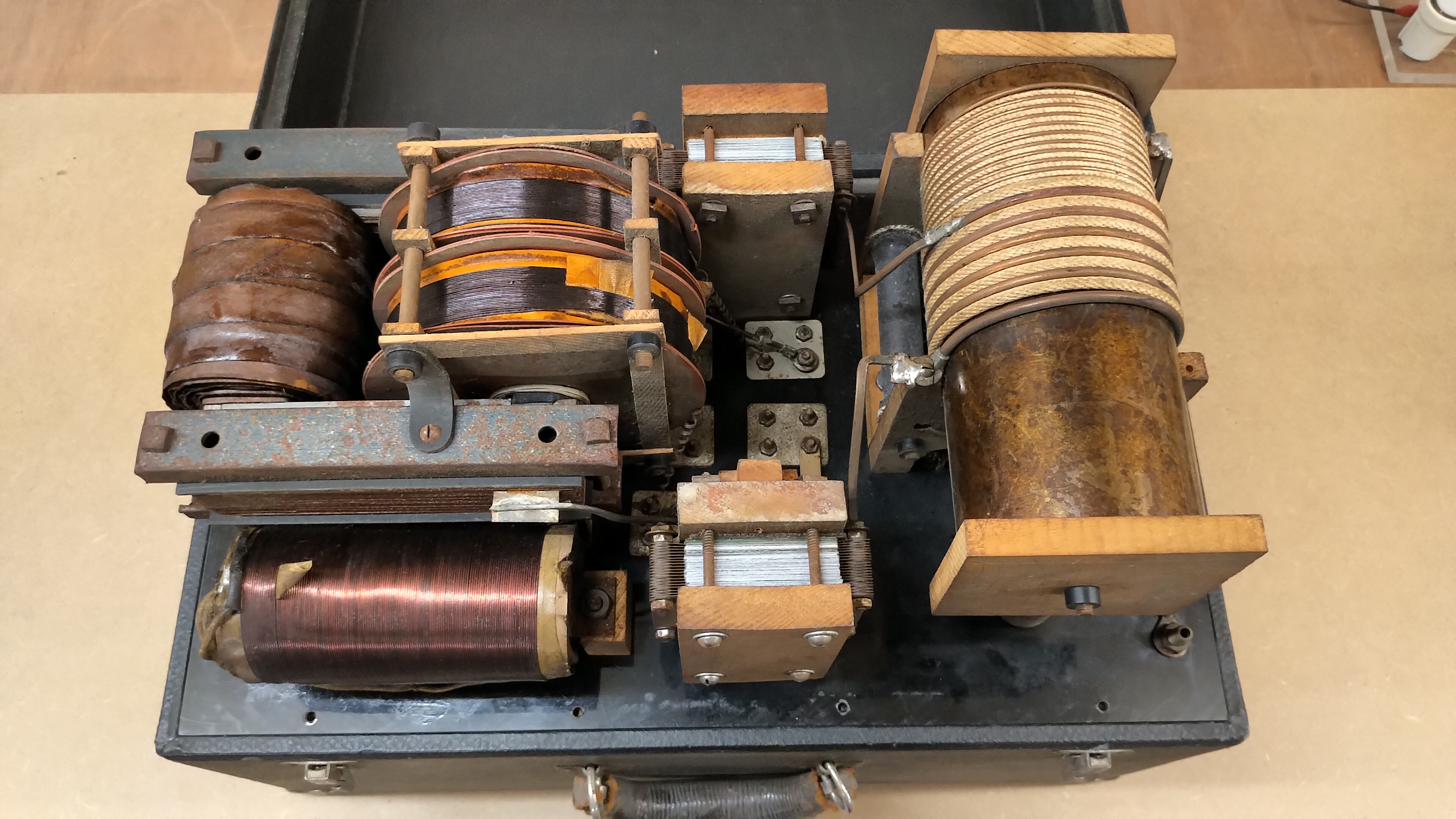
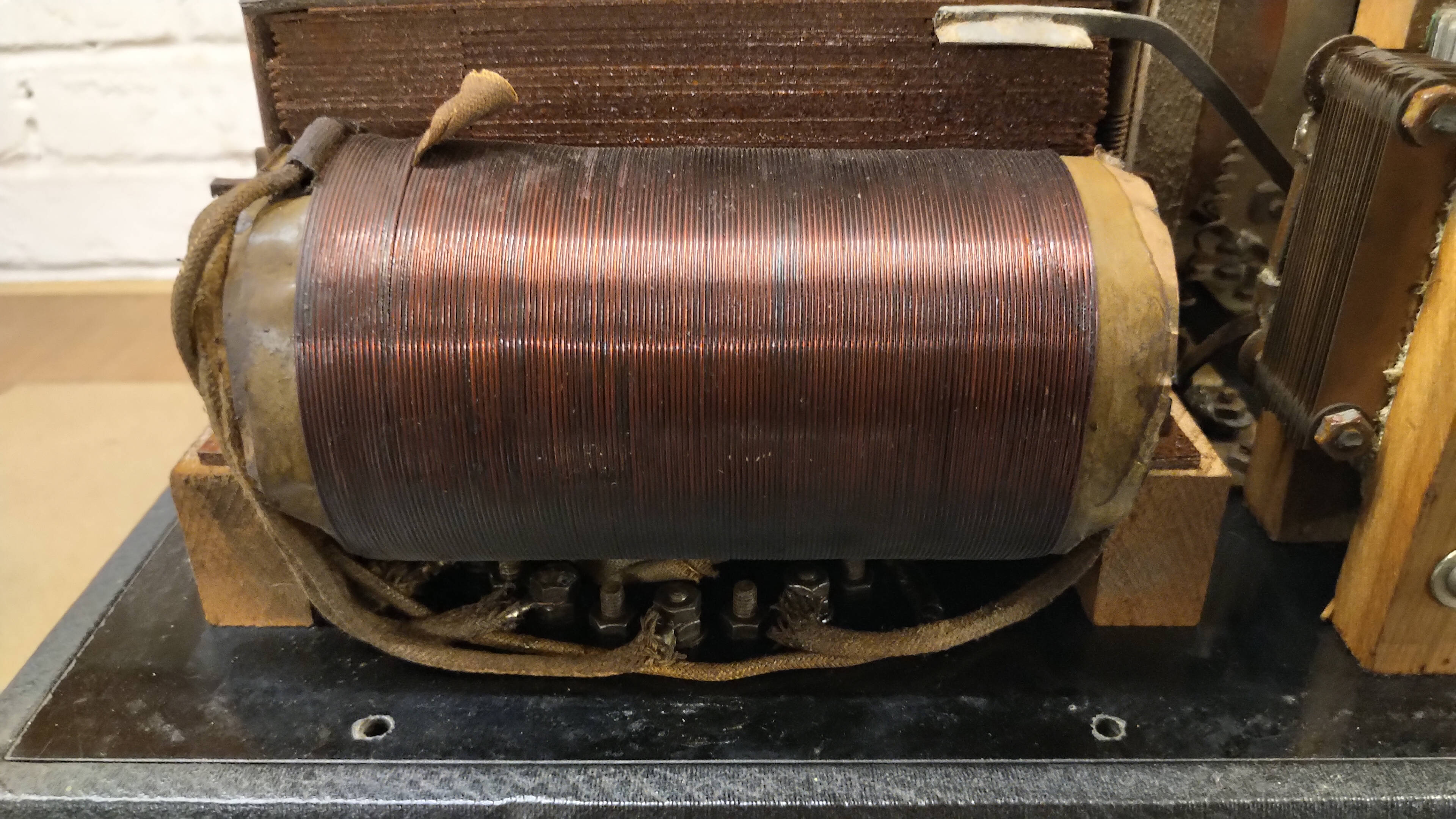
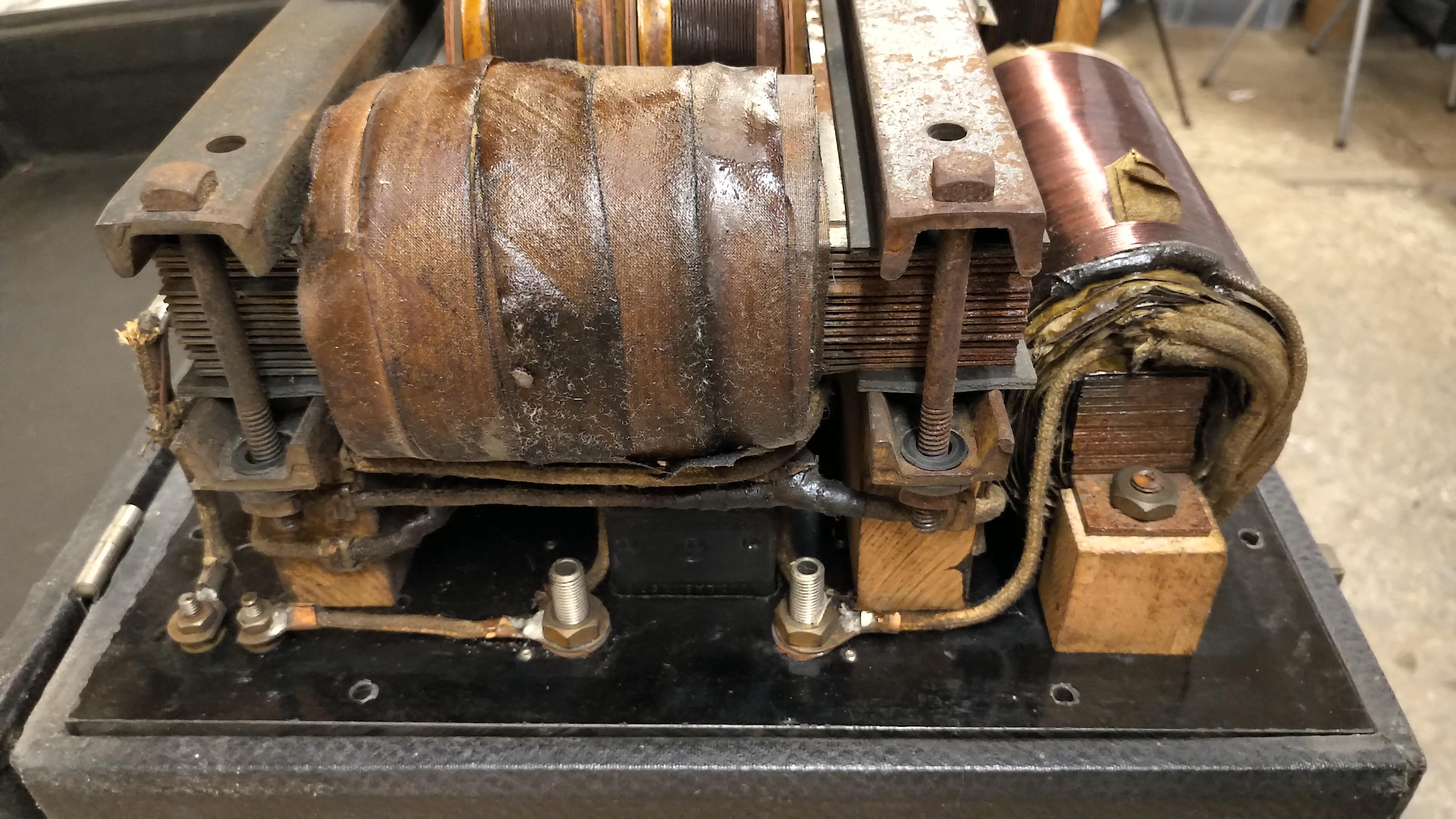
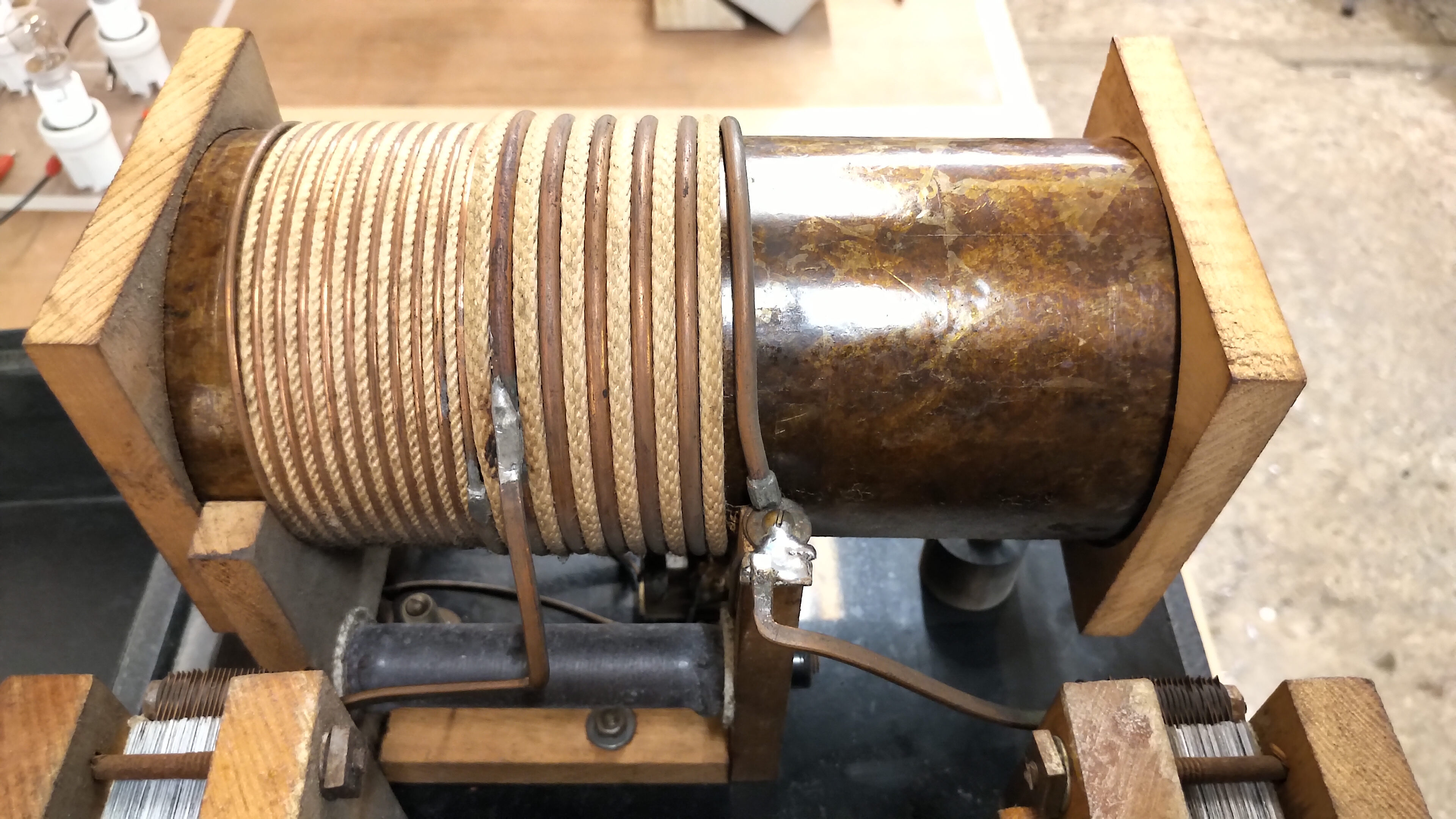
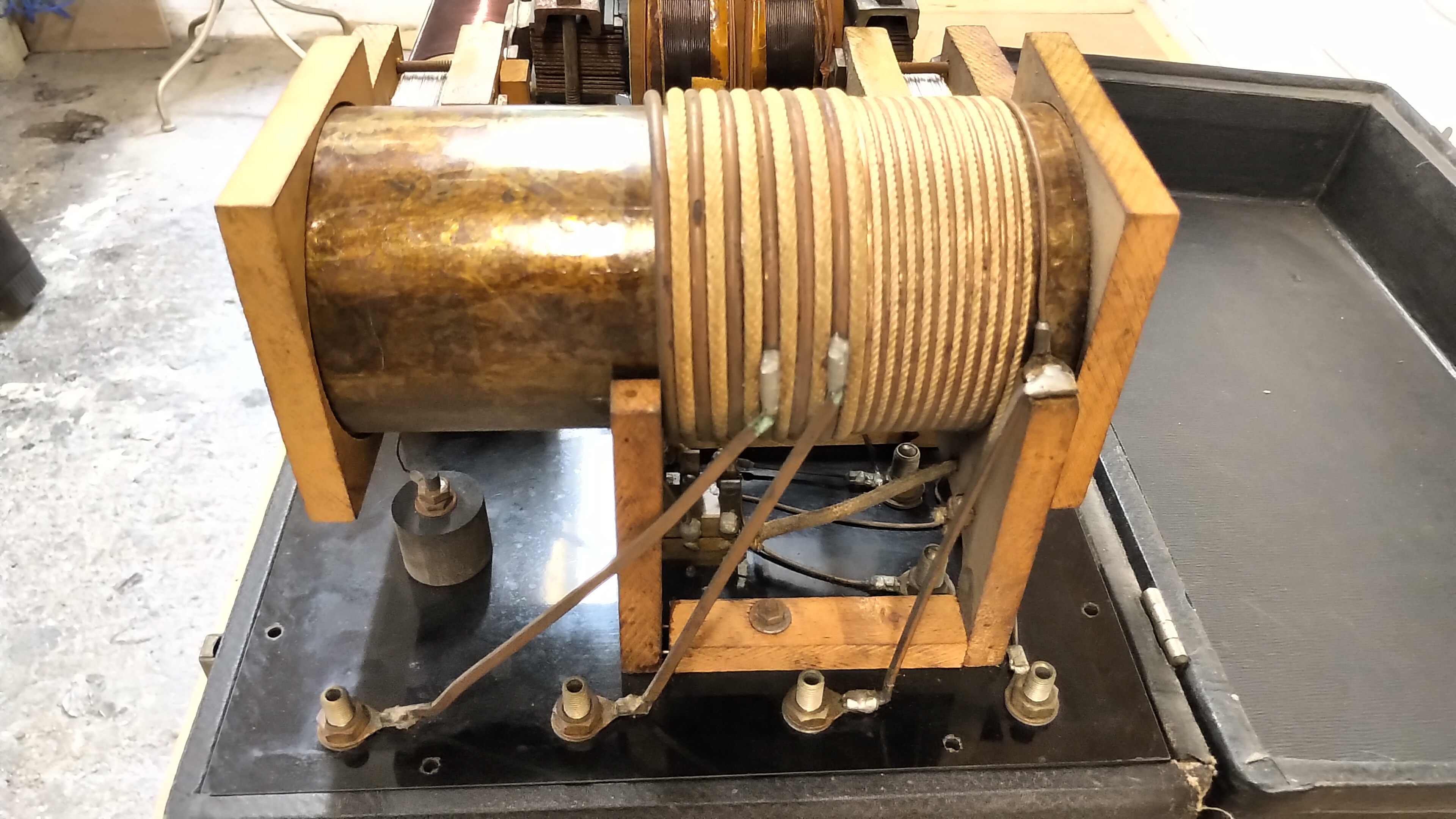
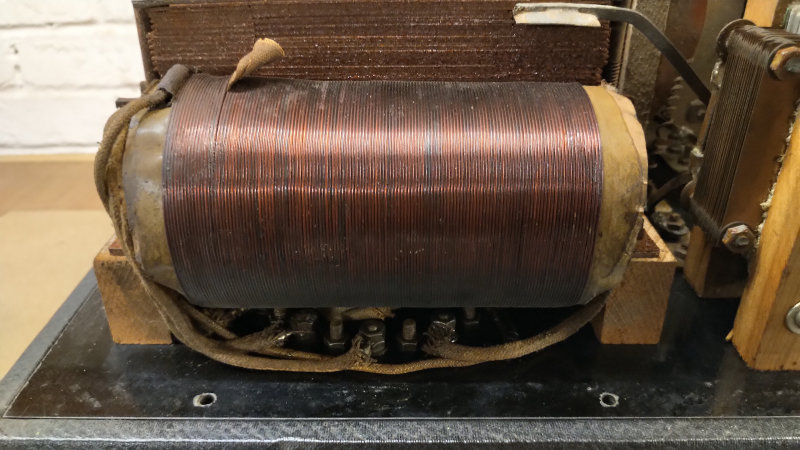
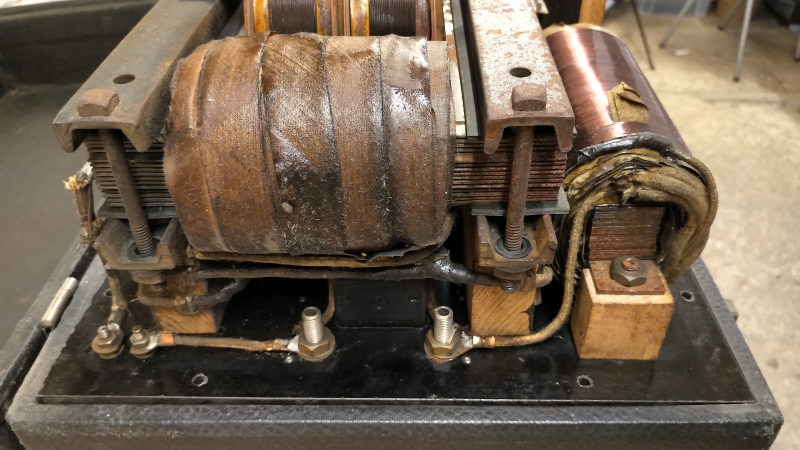
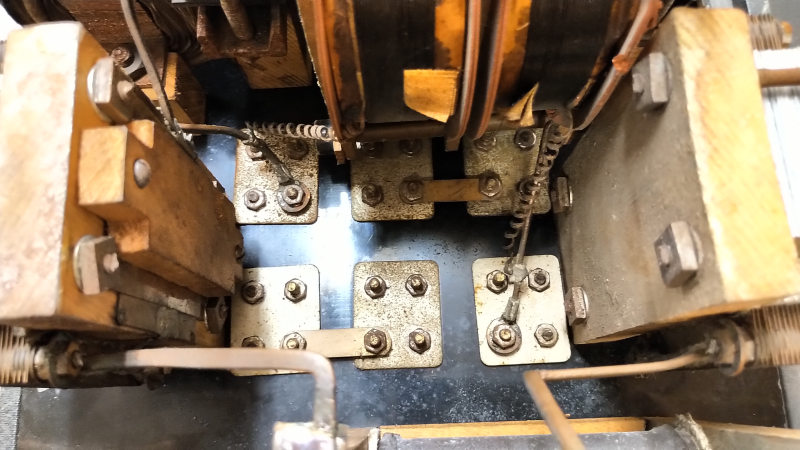
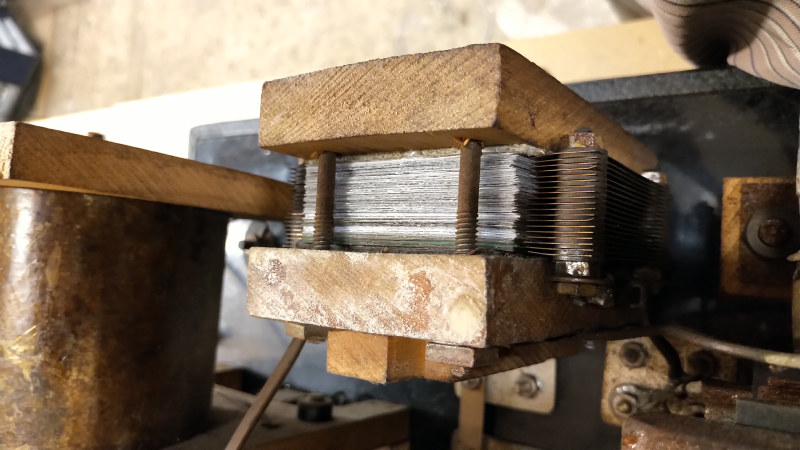
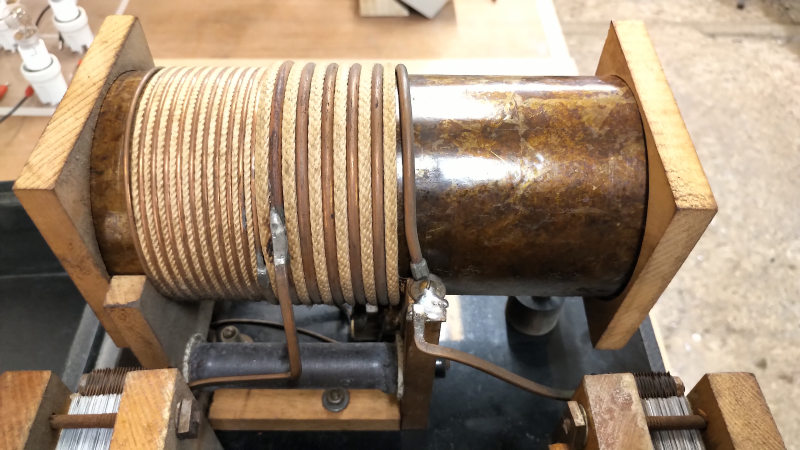
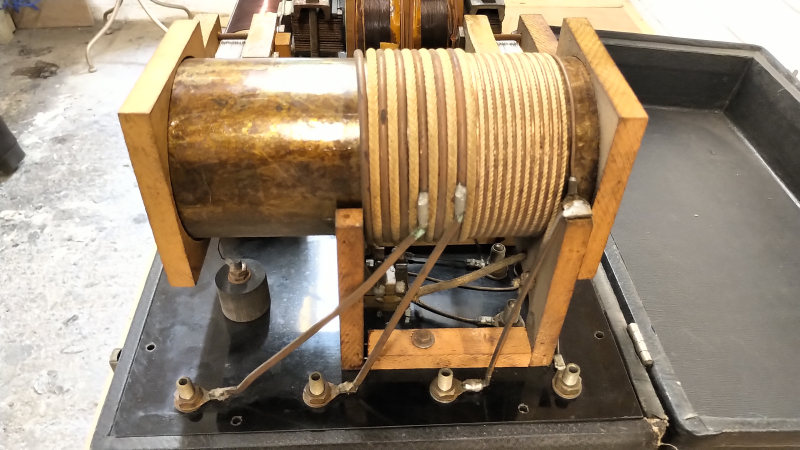
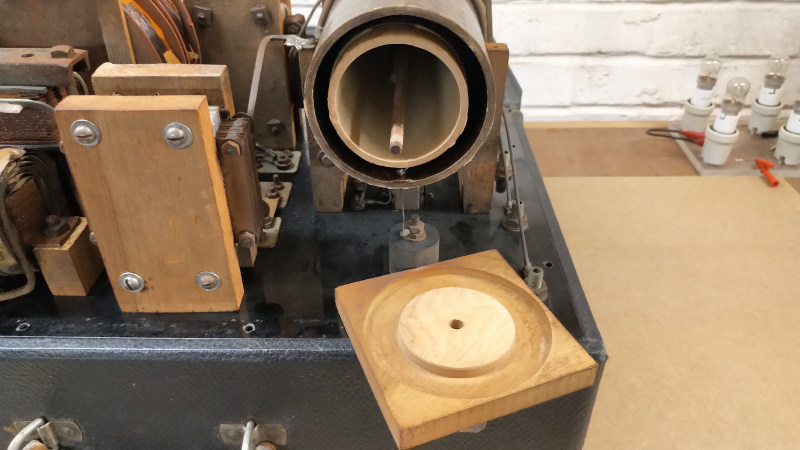
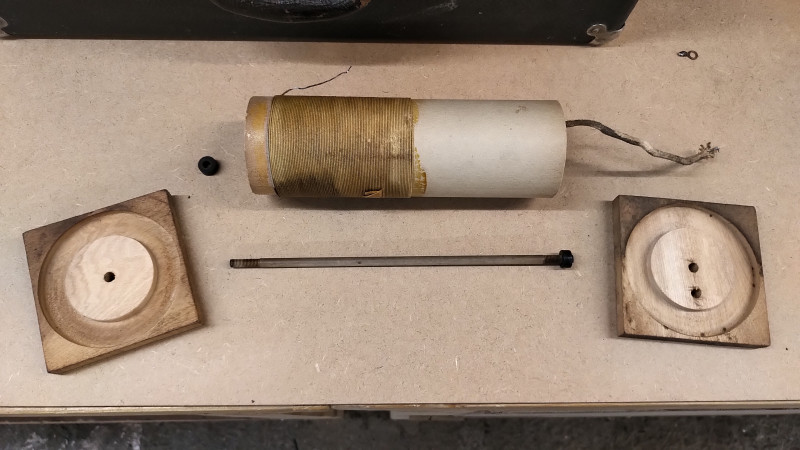
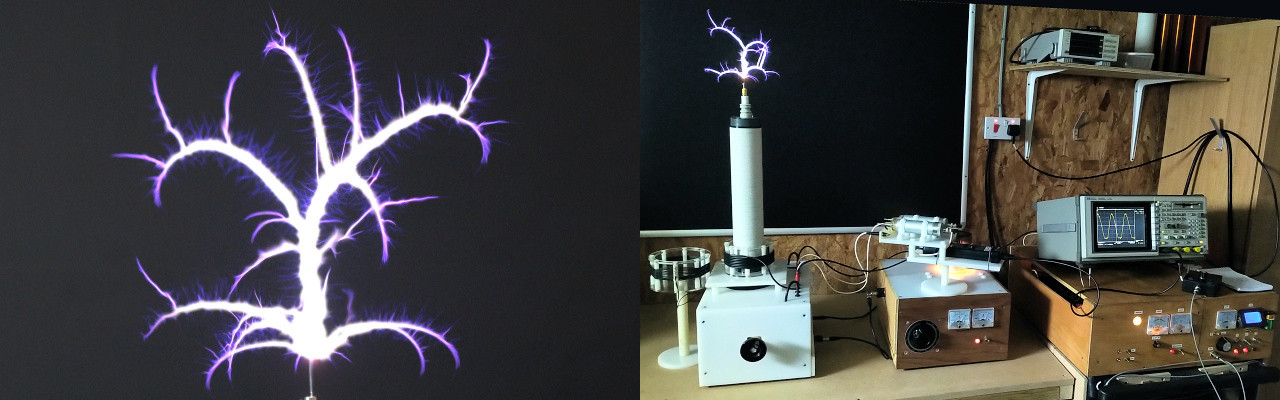
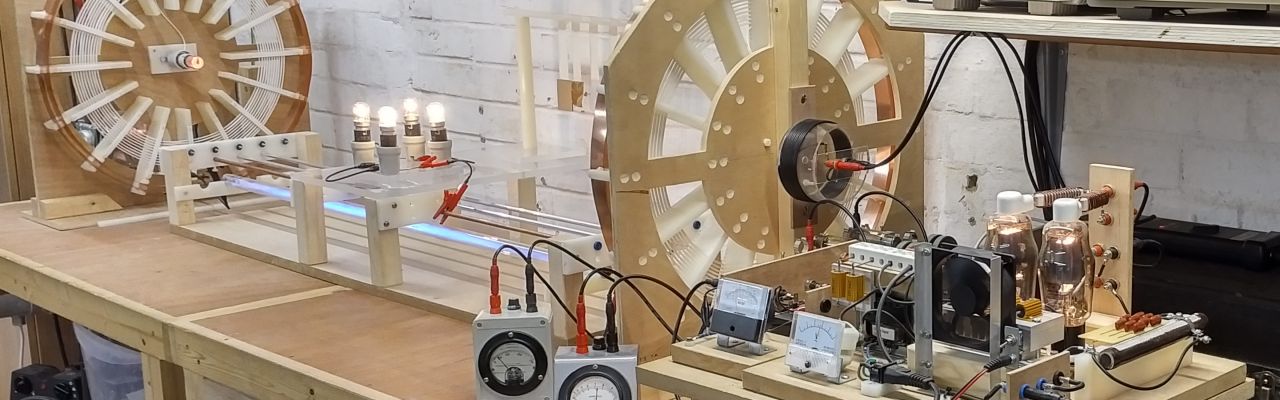
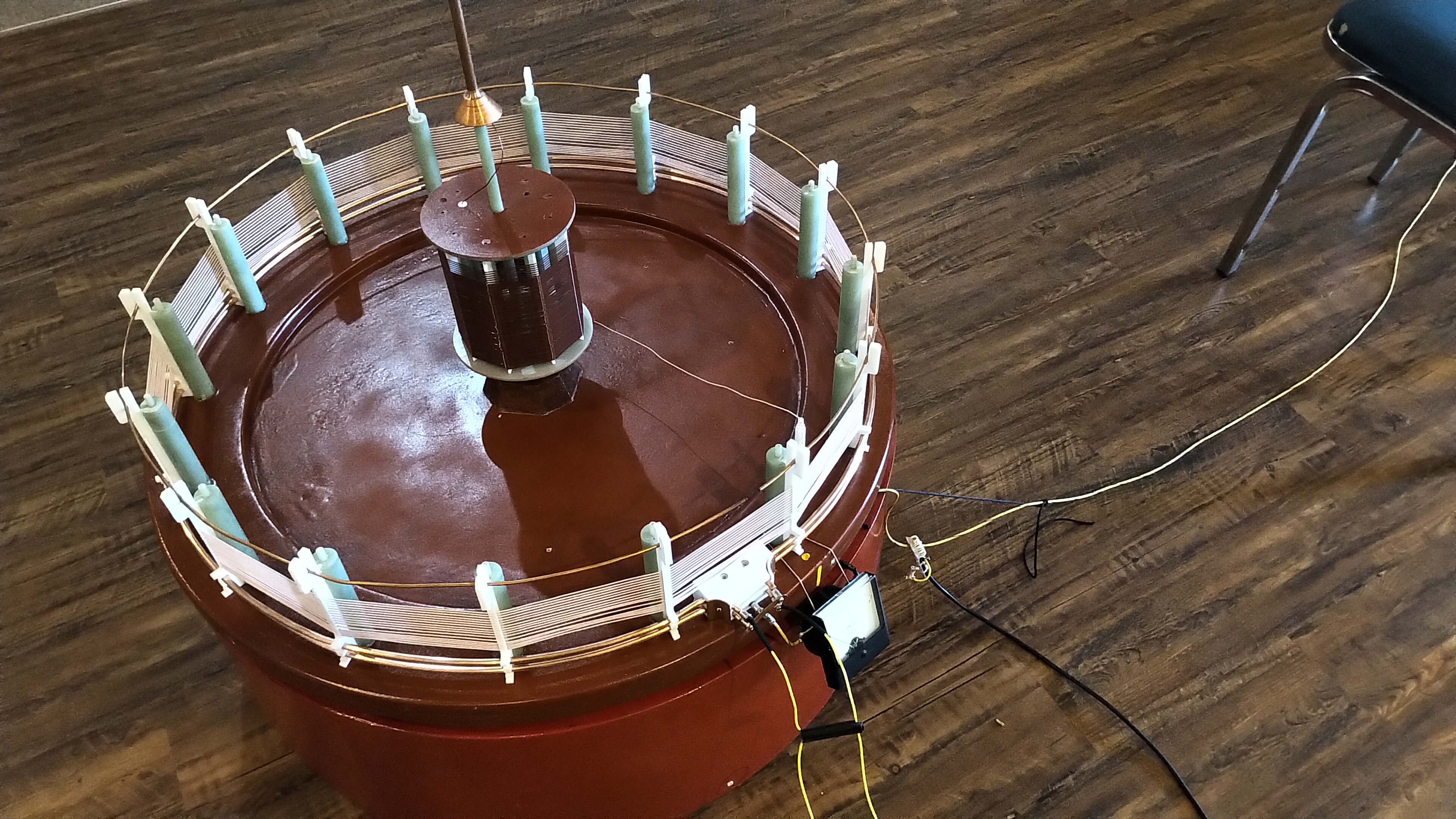
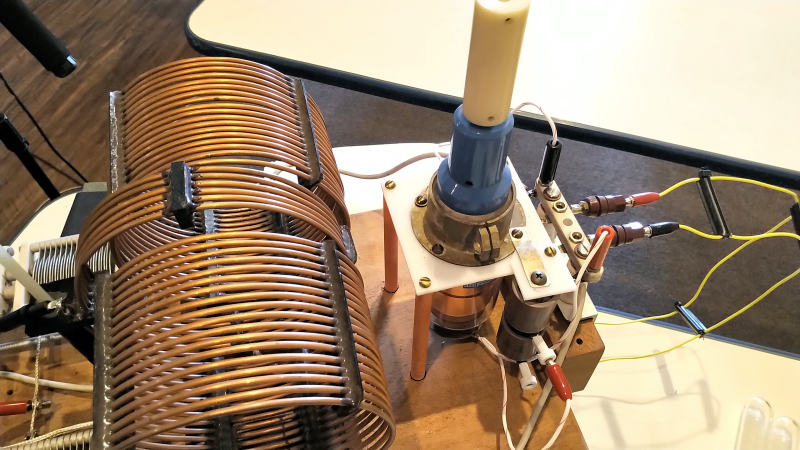
Figures 1 below show a range of pictures of the original transmitter and receiver setup from Eric Dollard’s TCS demonstration, including the generator used to power the experiment, and key results from the original demonstration. The red “transmitter” coil (RTC) was subsequently modified after the demonstration, (secondary coil re-wound, and with a single copper strap primary), in order to work well with the MWO spark gap generator. The green “receiver” coil (GRC) was left un-modified for the purpose of the endeavour, although it could be fine tuned using the extra coil telescopic extension. Ultimately for on-going experiments using the MWO generator, the GRC would be re-wound and adapted to more closely match the RTC.

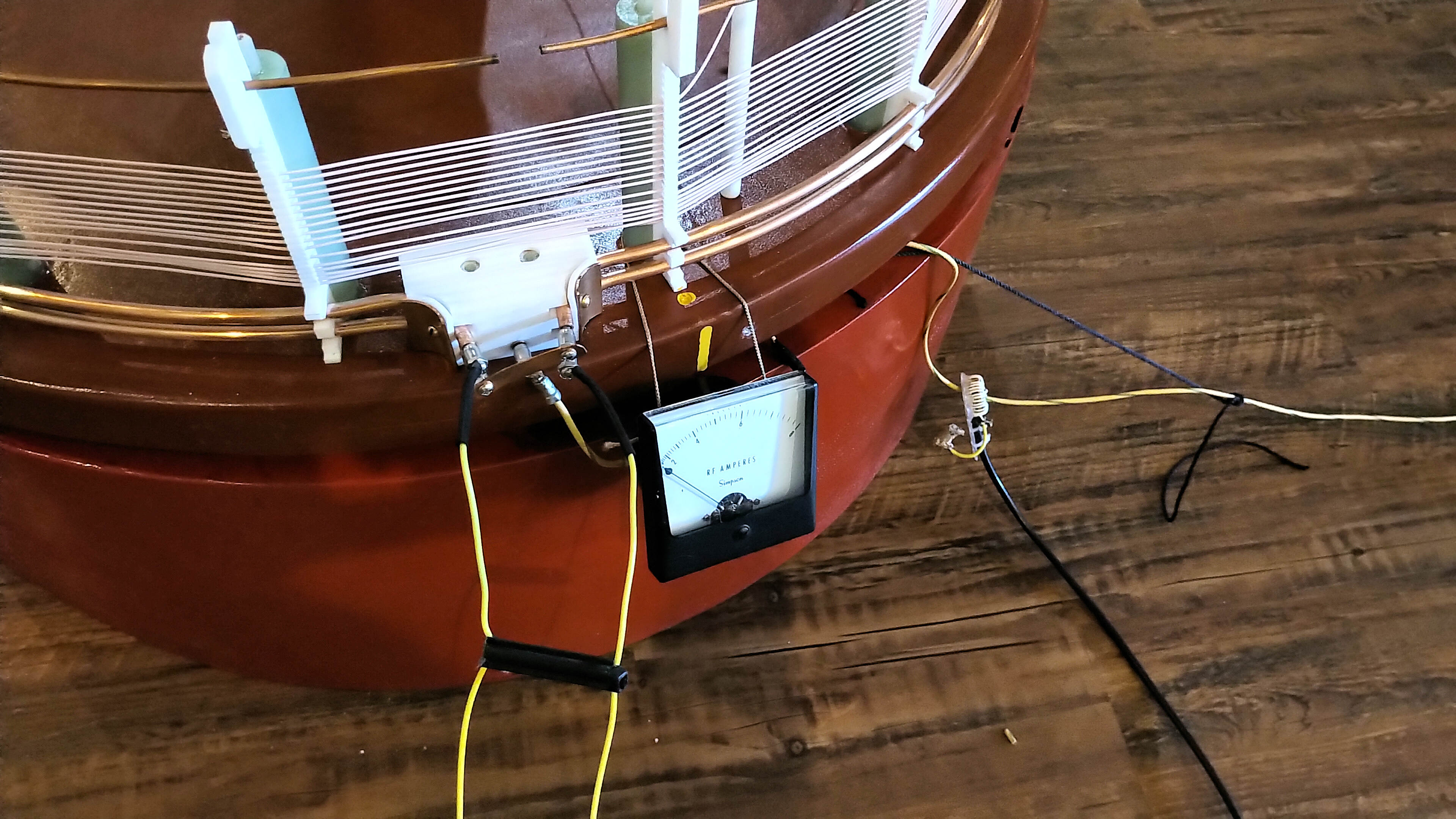


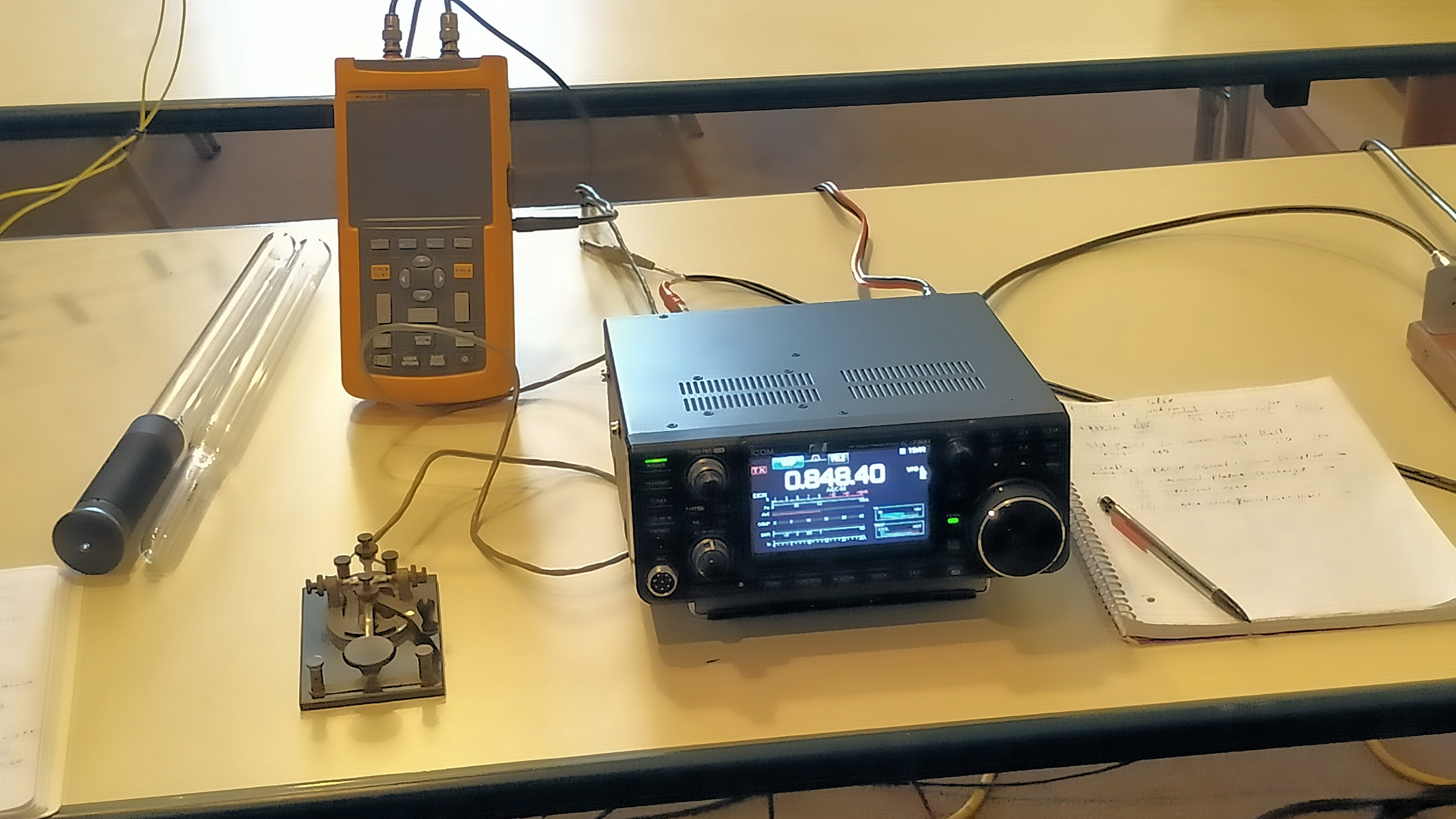









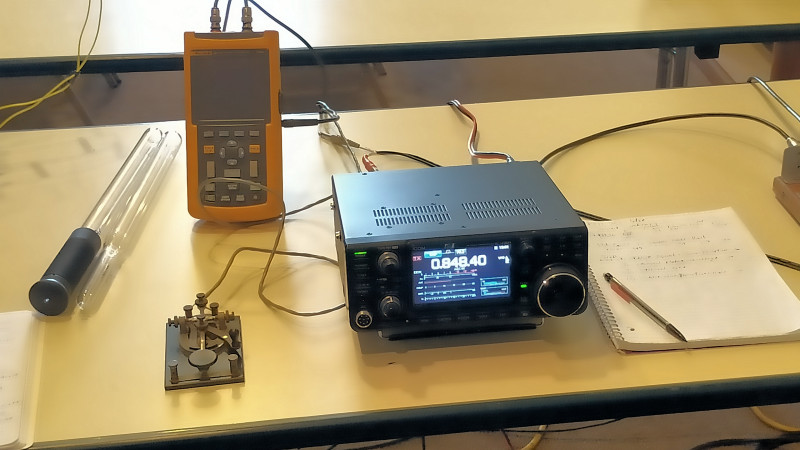





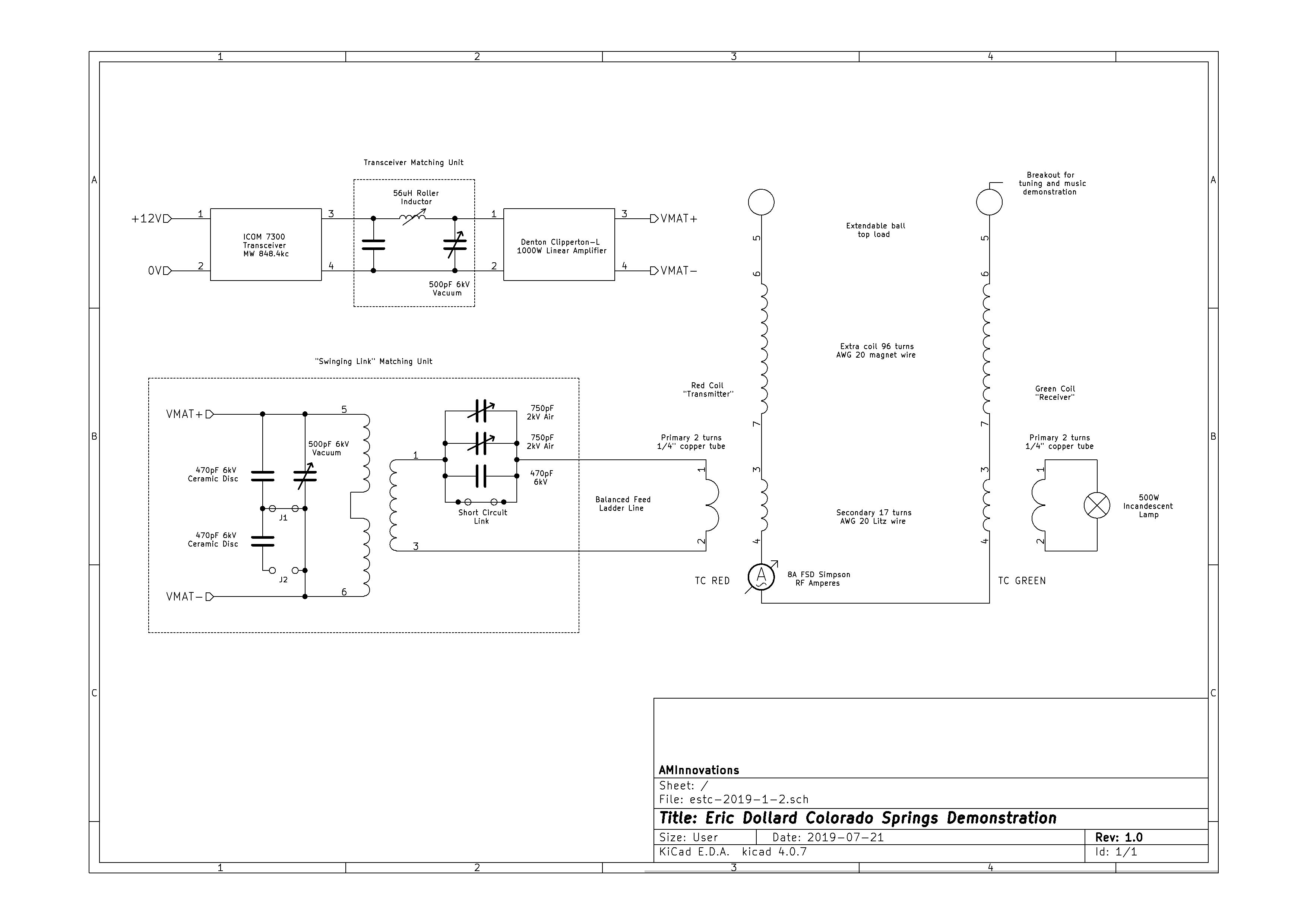
The original TCS demonstration was powered by a 1000W linear amplifier generator being driven at ~ 800W output to light a 500W incandescent bulb at the receiver primary, and where the electric power is transferred between the RTC and GRC by a single wire. The TCS demonstration with both coils fully configured and connected to the generator was tuned to a drive frequency of 848.4 kc/s, as can be seen in fig. 1.9 as the selected frequency of the transceiver.
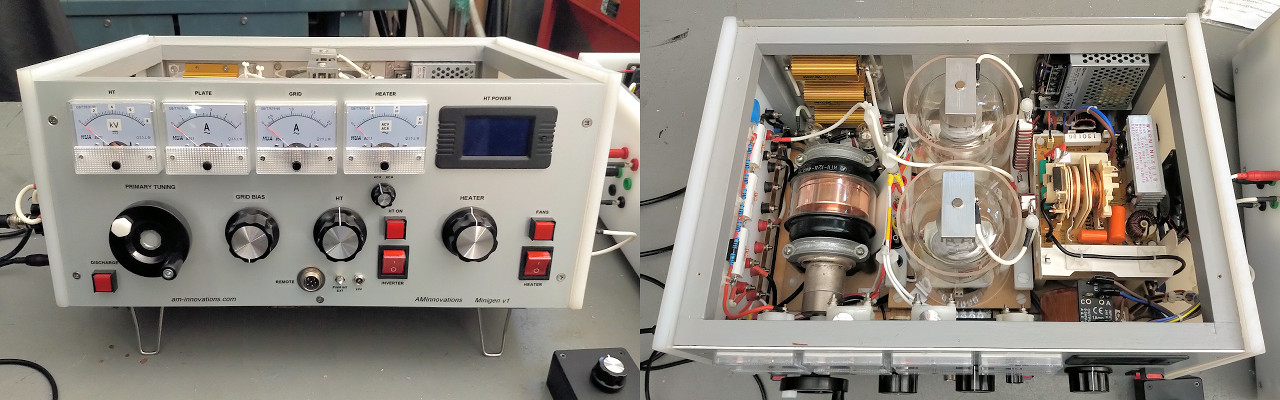
The transceiver is an ICOM-7300 which must have been modified to allow transmit on all frequencies, a modification that allows a radio amateur transceiver to generate a transmit signal outside of the designated amateur bands. This kind of modification turns a transceiver into a powerful bench top signal generator, with full modulation capabilities, and matched output powers from the transceiver alone of up to 100W in the MF and HF bands (300kc/s – 30Mc/s). 848 kc/s is in the MW (MF) radio broadcast band, and amplitude modulation is well suited here for the transmission of voice and music signals, as was also demonstrated in the original experiment.
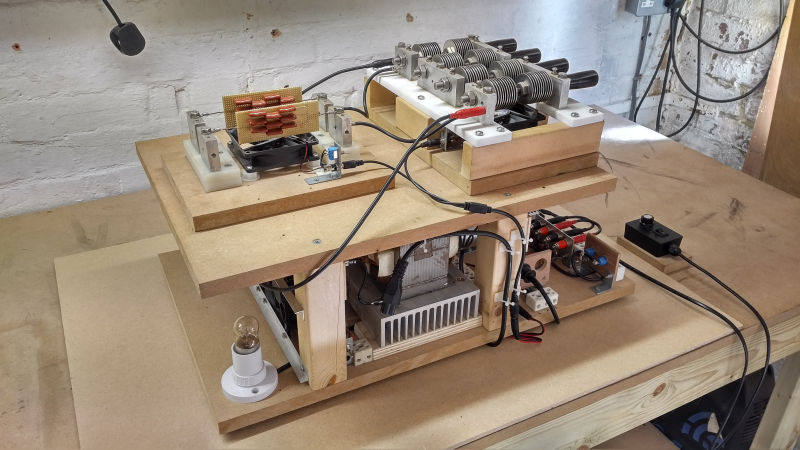
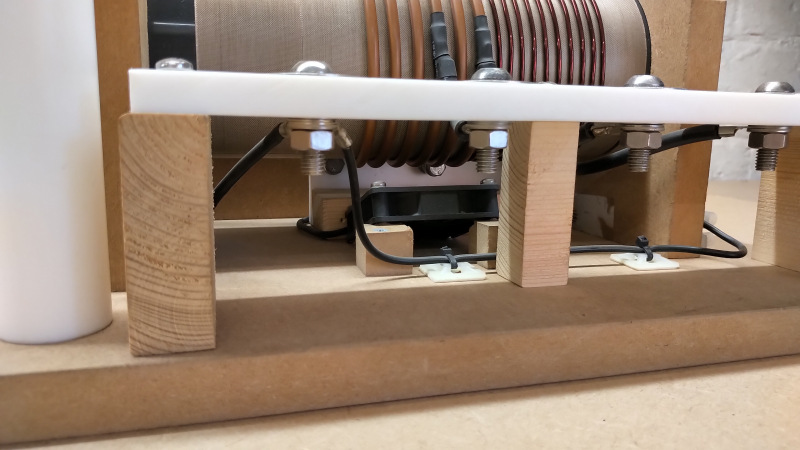
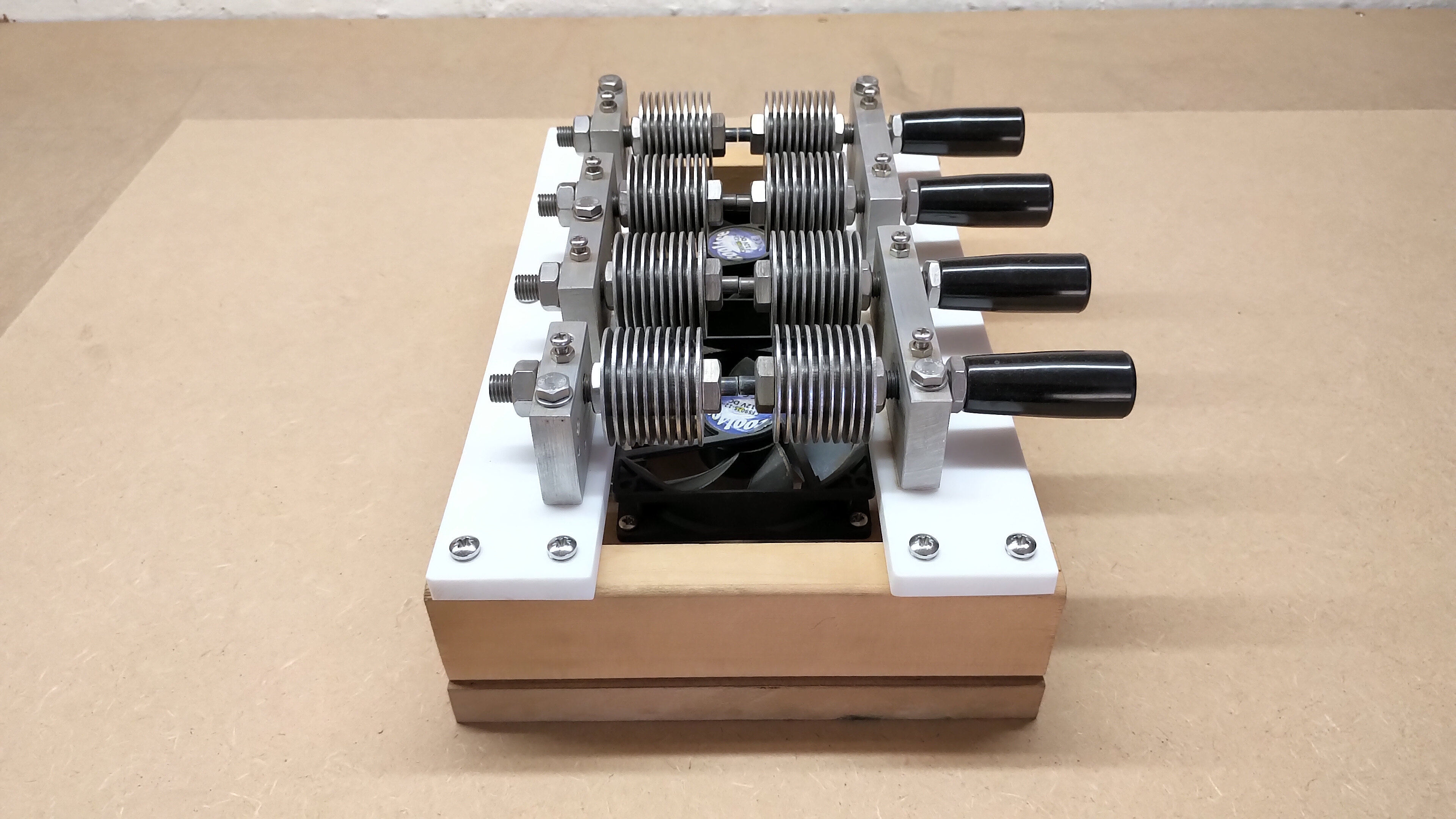
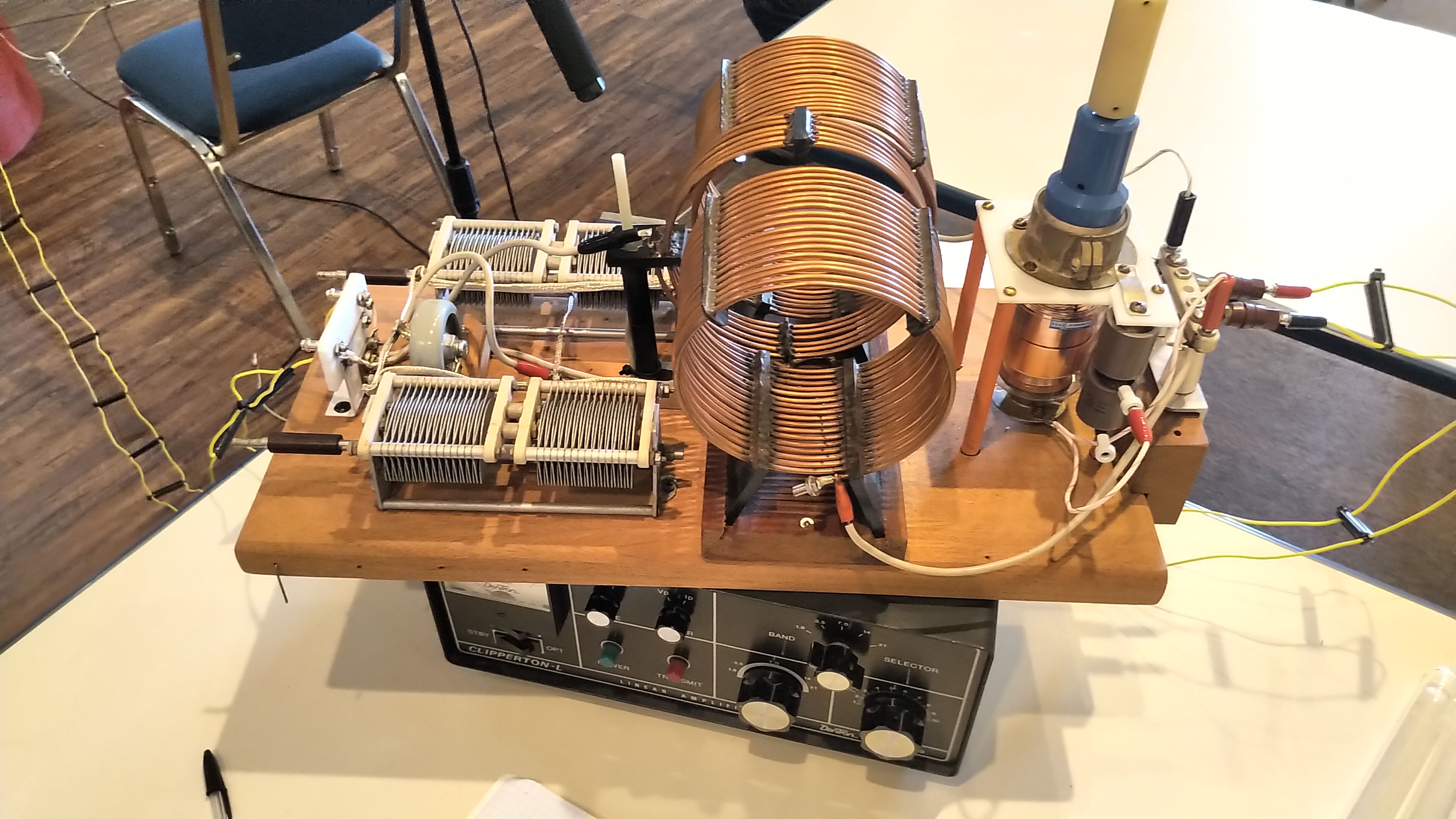
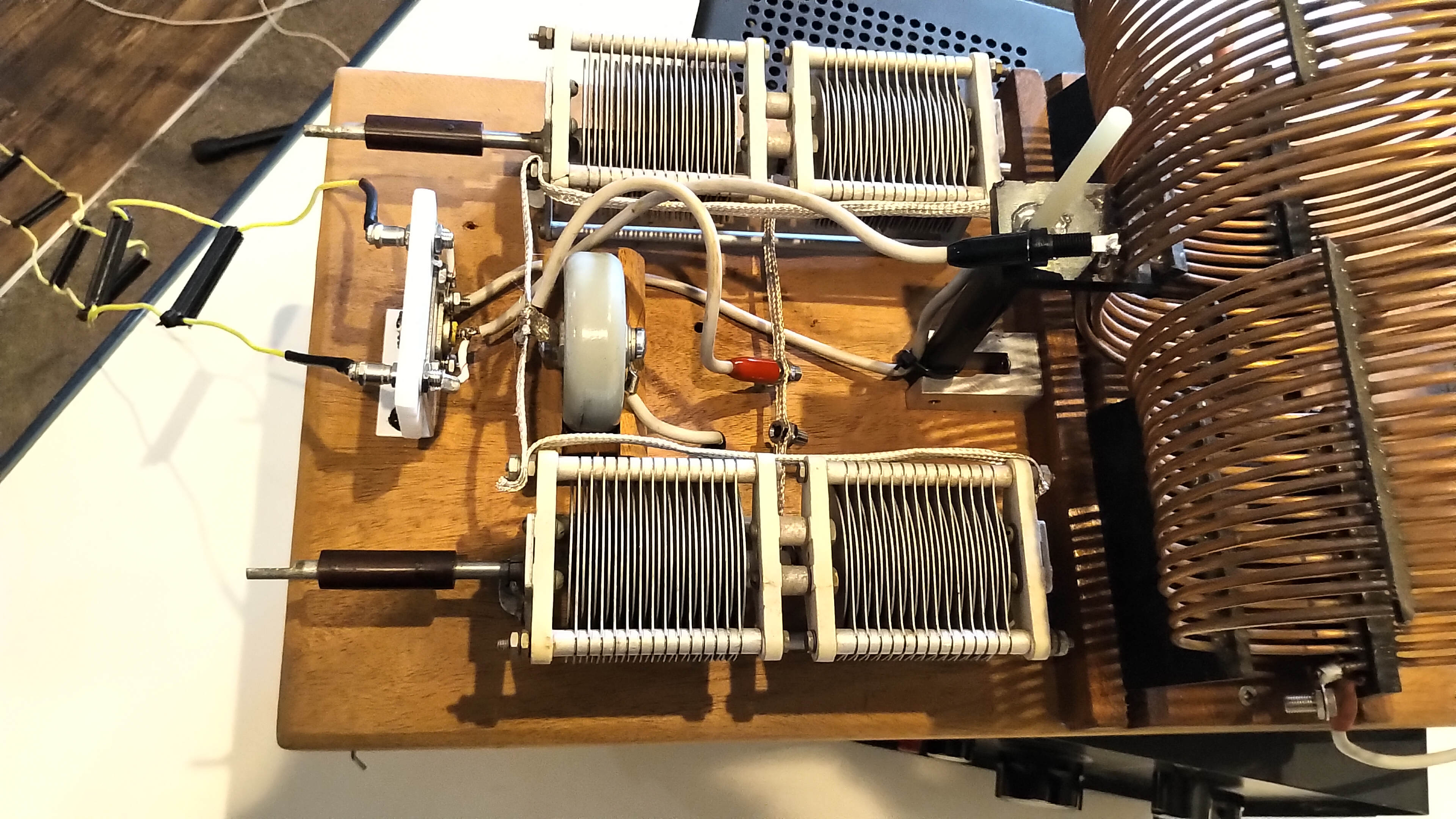
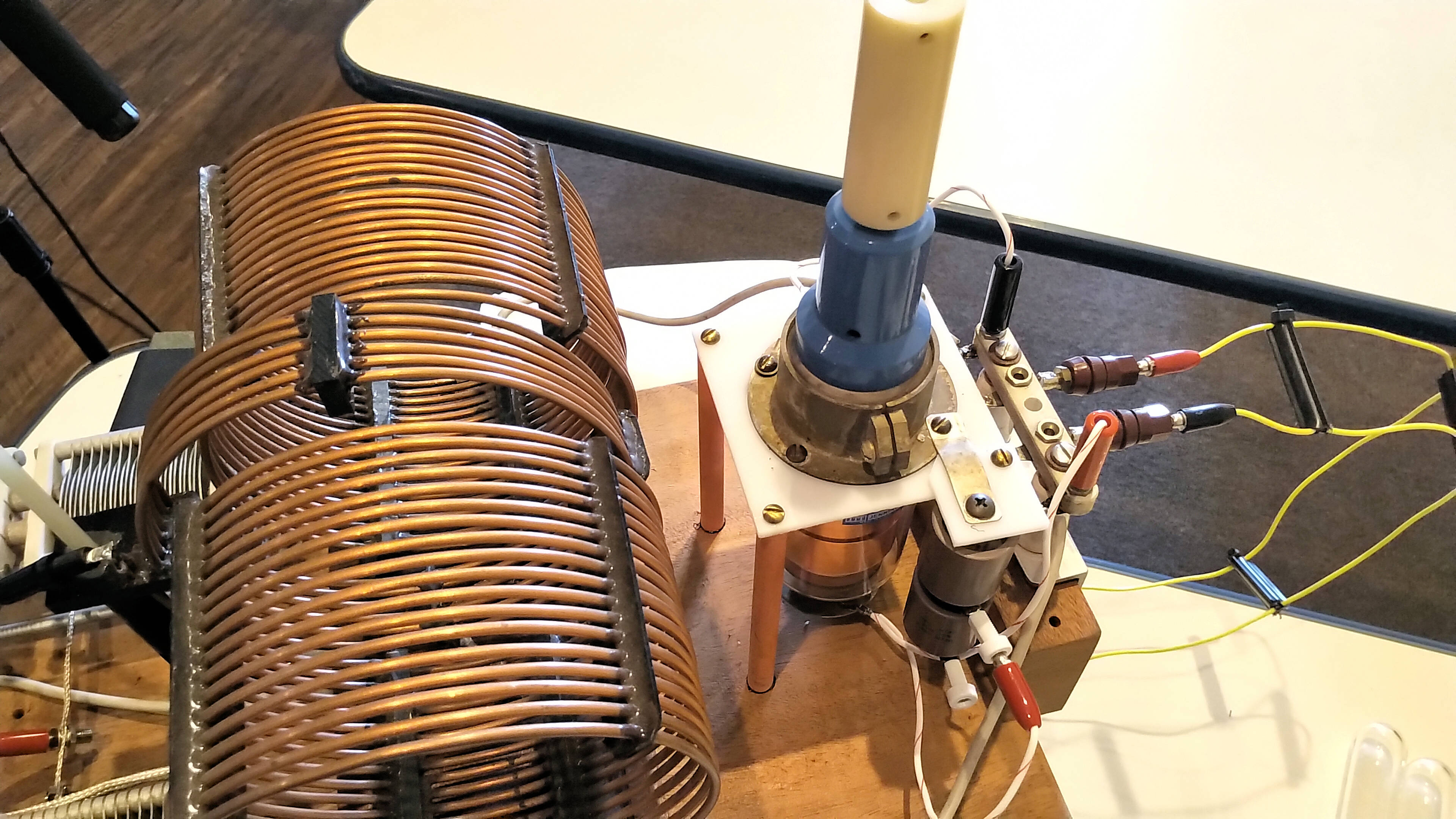
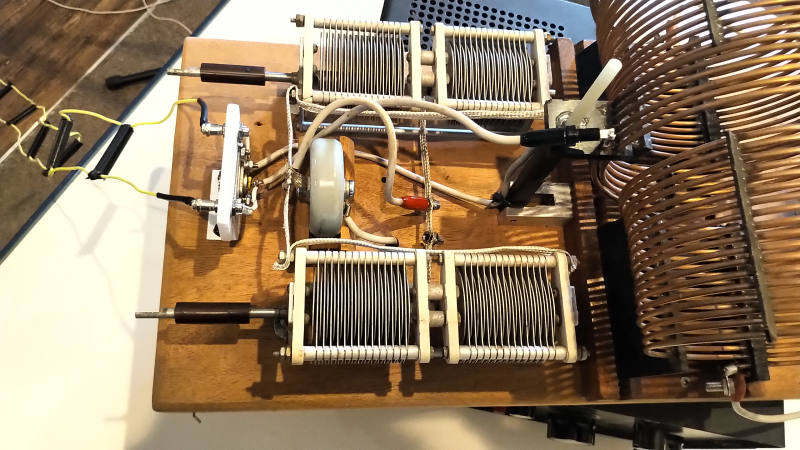
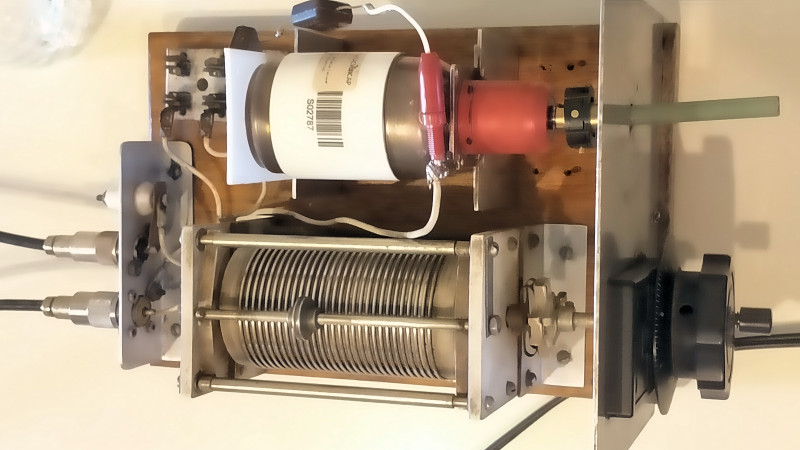
The ICOM transceiver is connected via a matching unit to the Denton linear amplifier. This specific brand and model of linear amplifier has no matching unit at its input, which is why external matching is required from the ICOM 50Ω output to the lower impedance Denton input. The passive matching unit is shown in fig. 1.10, and also in the schematic of fig. 2.1.
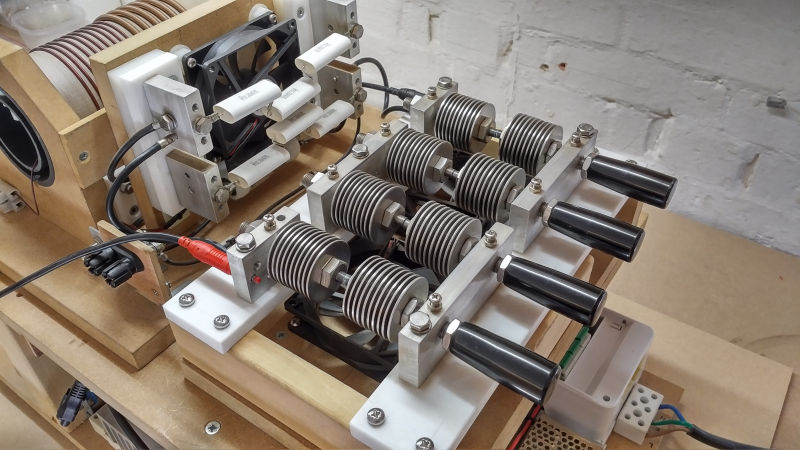
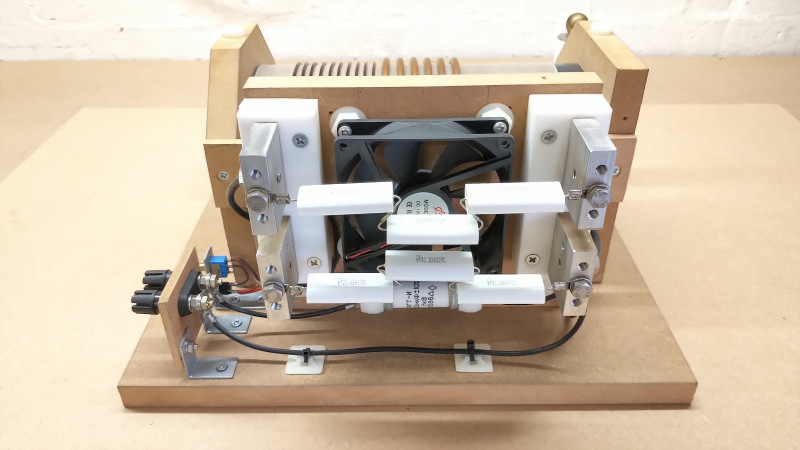
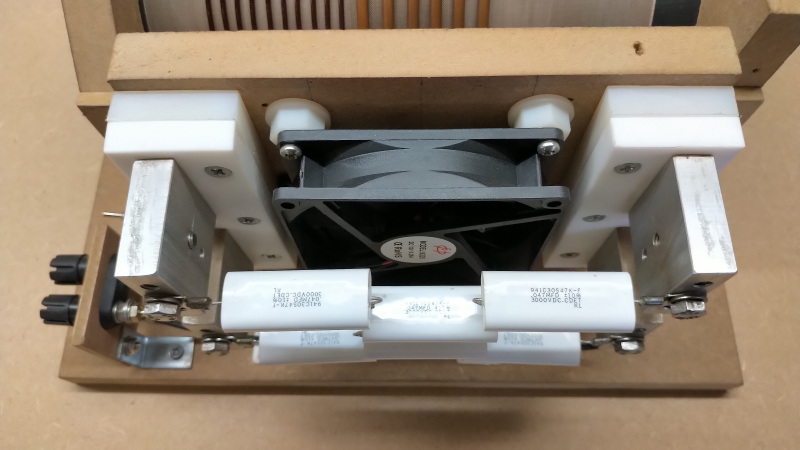
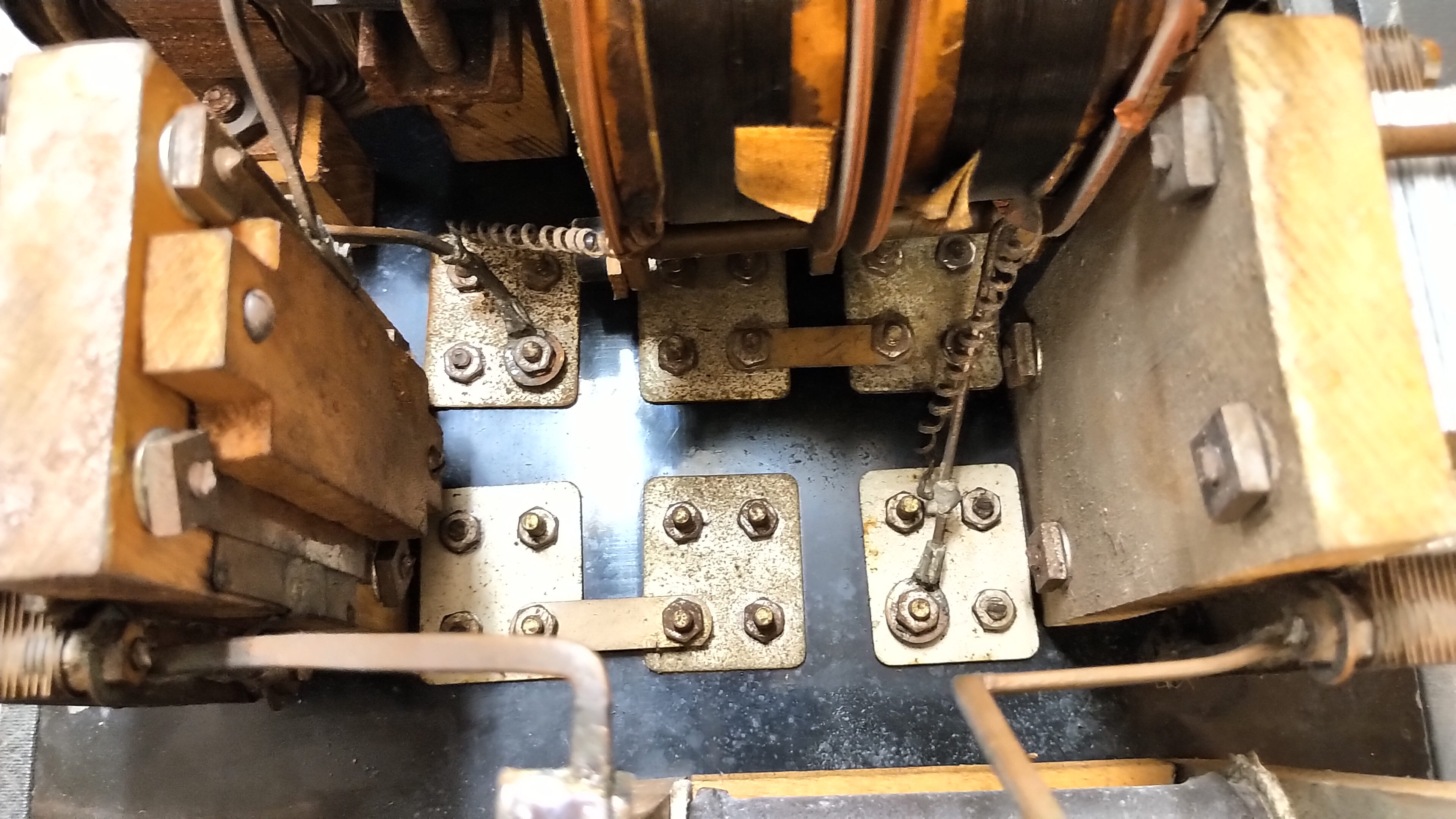
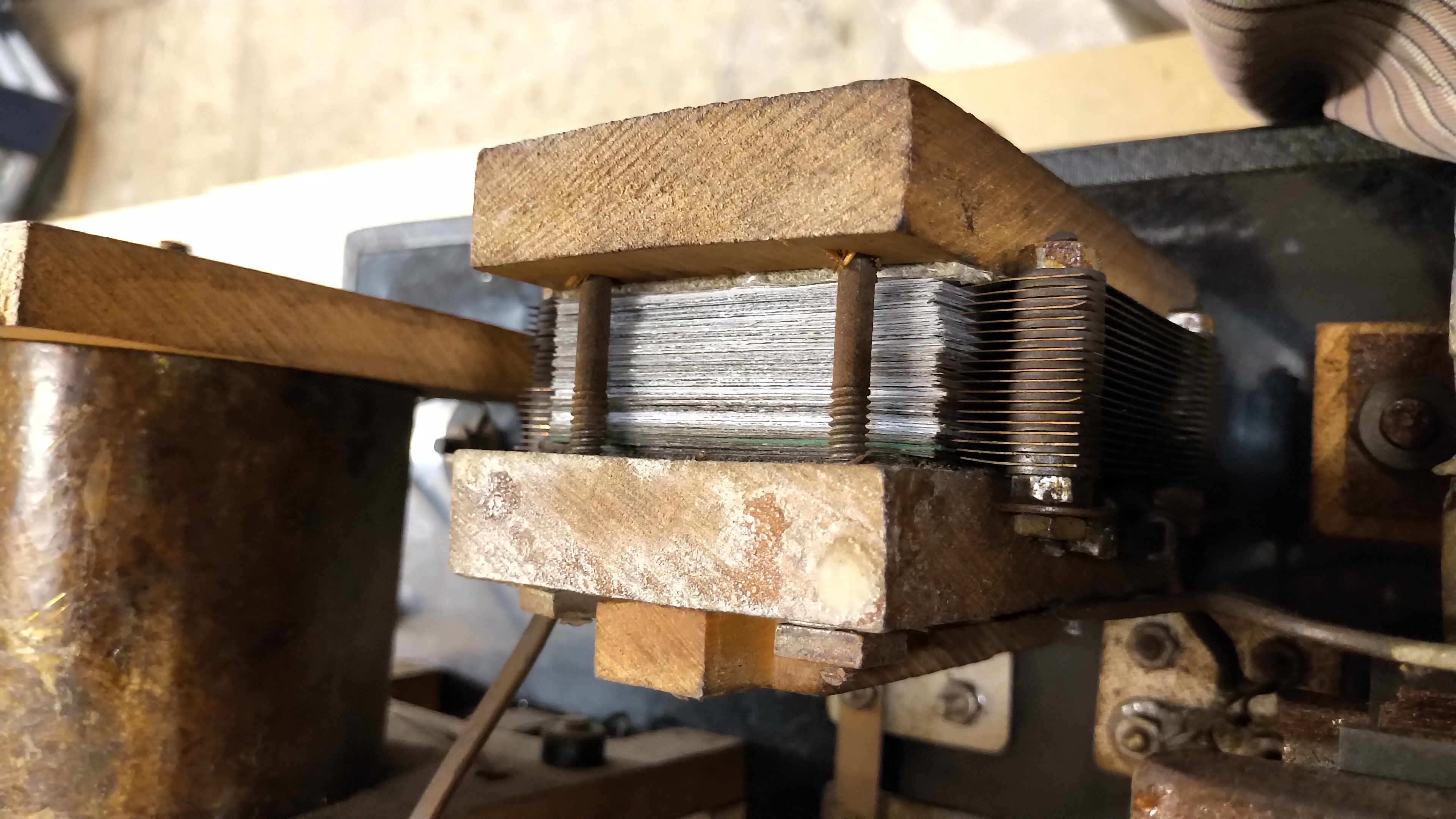
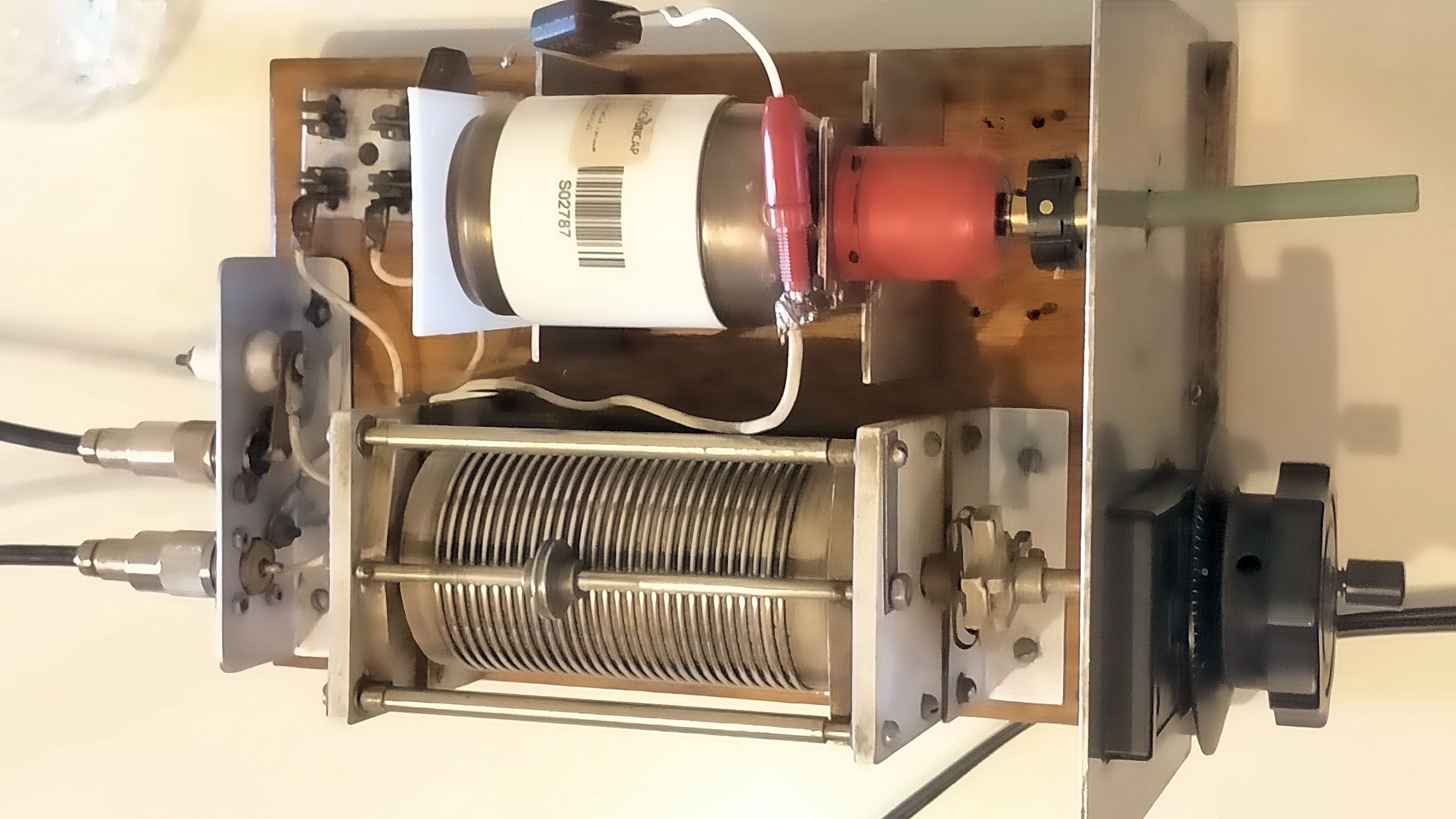
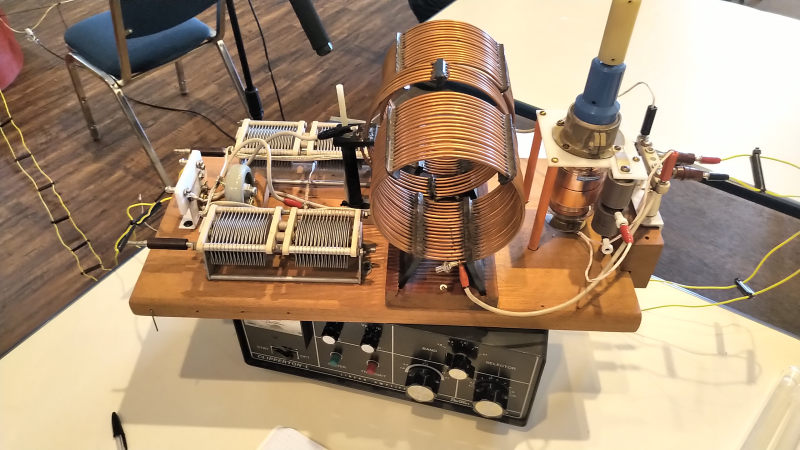
The Denton Clipperton-L is a linear amplifier using 4 x 572B vacuum tubes with a band selected matching unit at its output, and a total output peak voltage of ~ 500V. The lowest band provided internally for matching at the output of the amplifier is the HF 160m band at ~ 1.8Mc/s. The much lower MW signal at 848kc/s would need additional matching and balancing between the amplifier output and the input to the primary of the RTC, (the output of the amplifier is an unbalanced feed e.g. coaxial, whereas the connecting transmission line and the primary are better fed with a balanced feed). The amplifier passive matching unit is shown in figures 1.6 – 1.8, and is also shown in the schematic of fig. 2.1.
The various different experiments conducted in the original demonstration included the following:
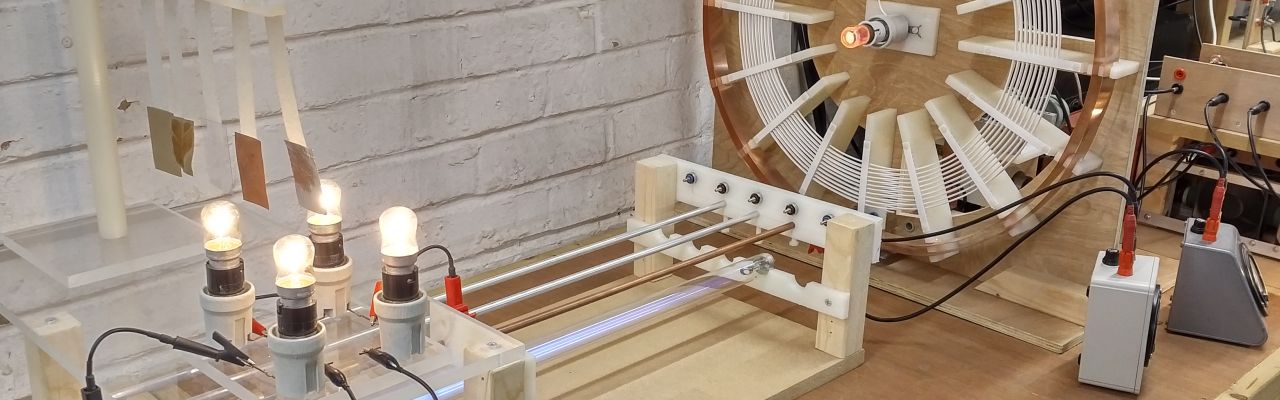
Fig 1.13. Shows Eric Dollard finding the null electric field region between the RTC and GRC, and using a 6′ domestic fluorescent tube light.
Fig 1.14. Shows Eric Dollard testing the field surrounding the RTC extra coil extension top load, using a helium-neon gas filled tube.
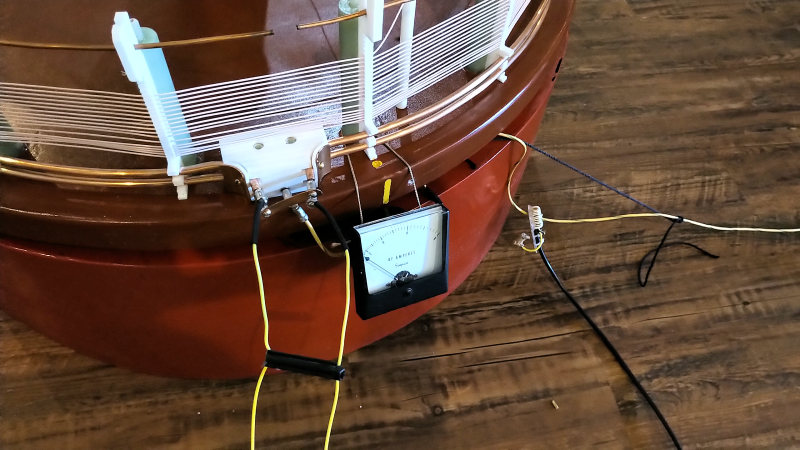
Fig 1.15. Shows single wire transmission of electric power, and fully lighting a 500W incandescent light bulb at the primary of the GRC.
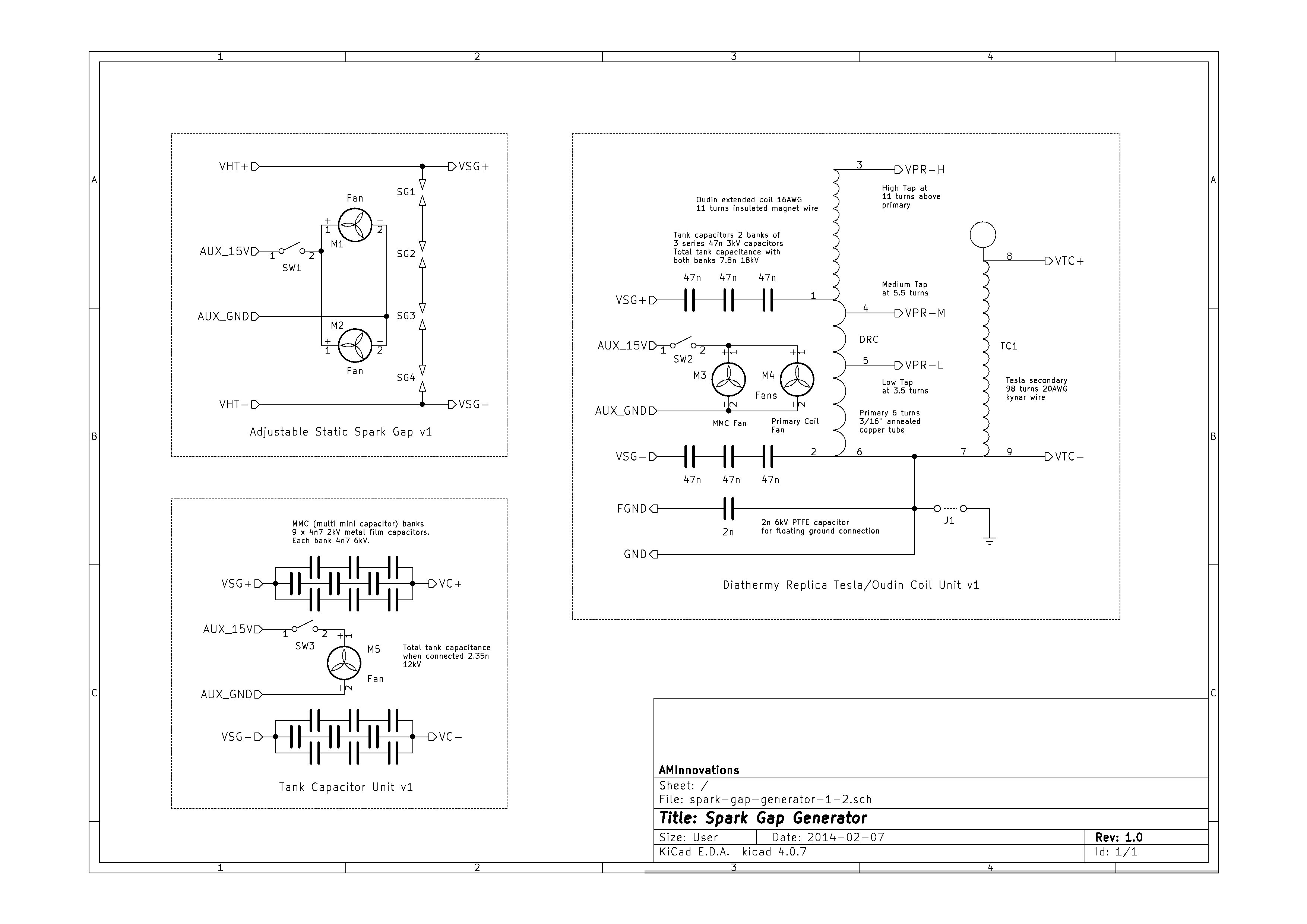
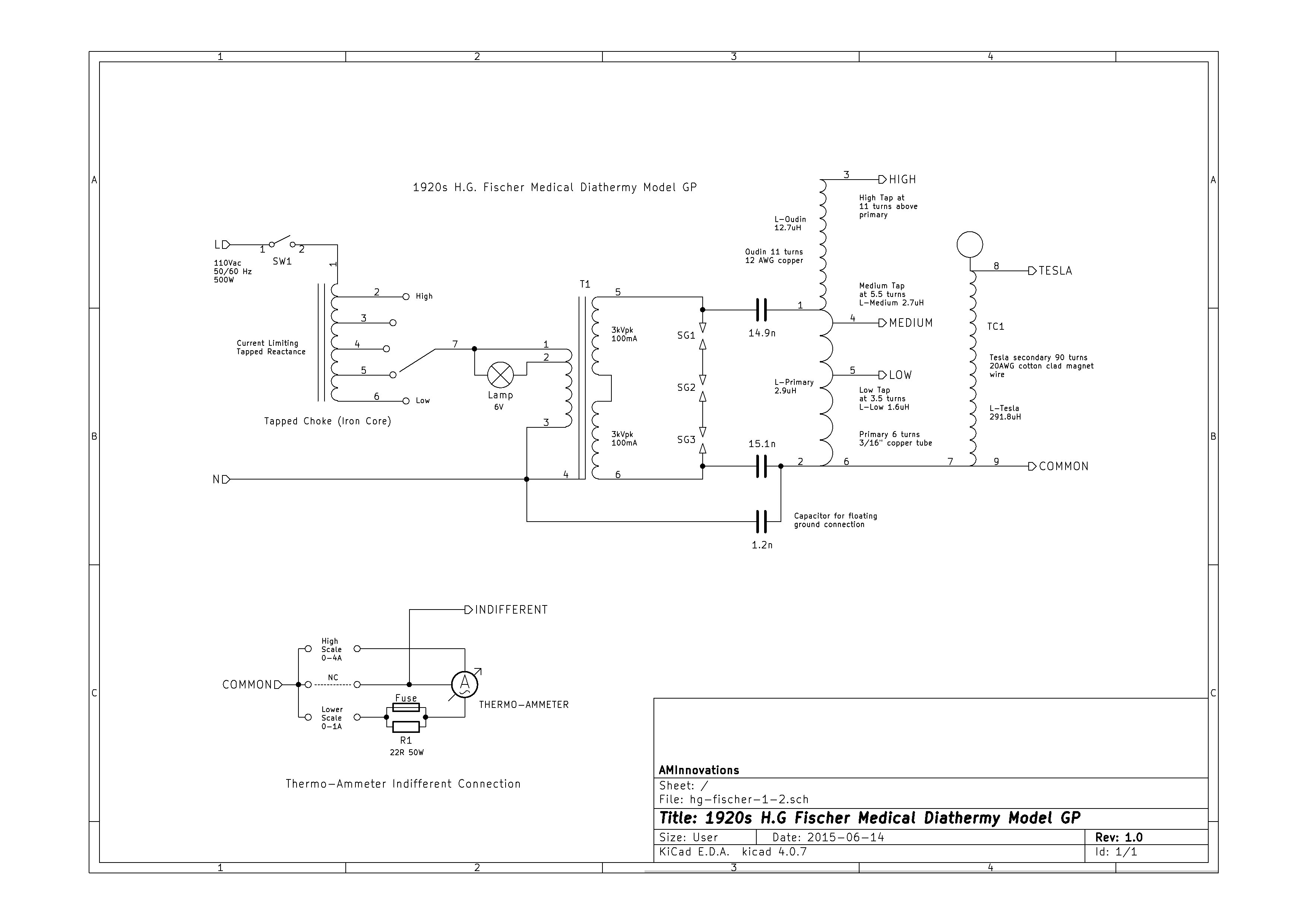
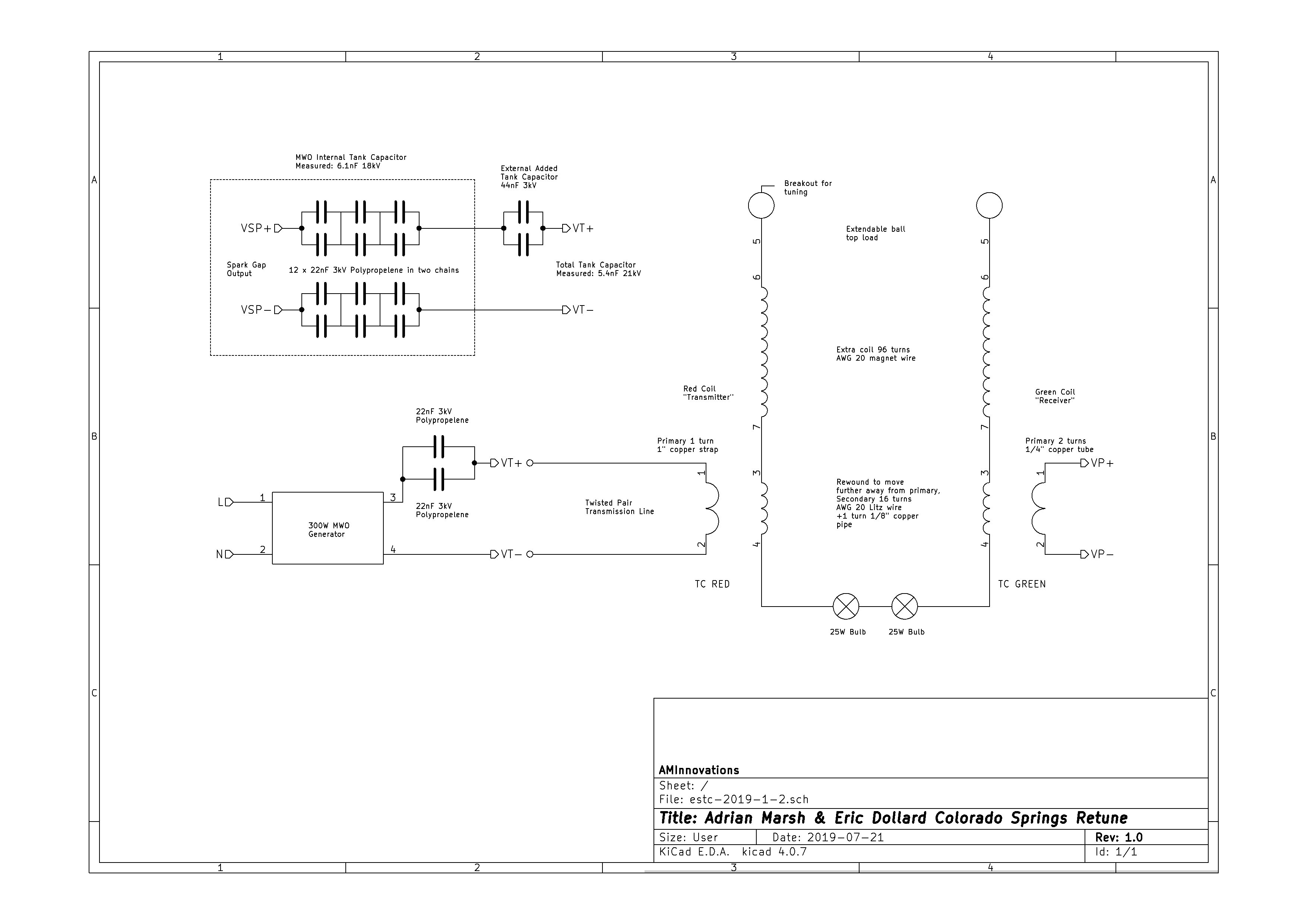
Figures 2 below show the schematics for both the linear amplifier generator and coil arrangement for Eric Dollard’s original TCS demonstration, and a second schematic for the TCS experiment retune using the MWO spark gap generator. The high-resolution versions can be viewed by clicking on the following links TCS Demonstration, and TCS Retune.
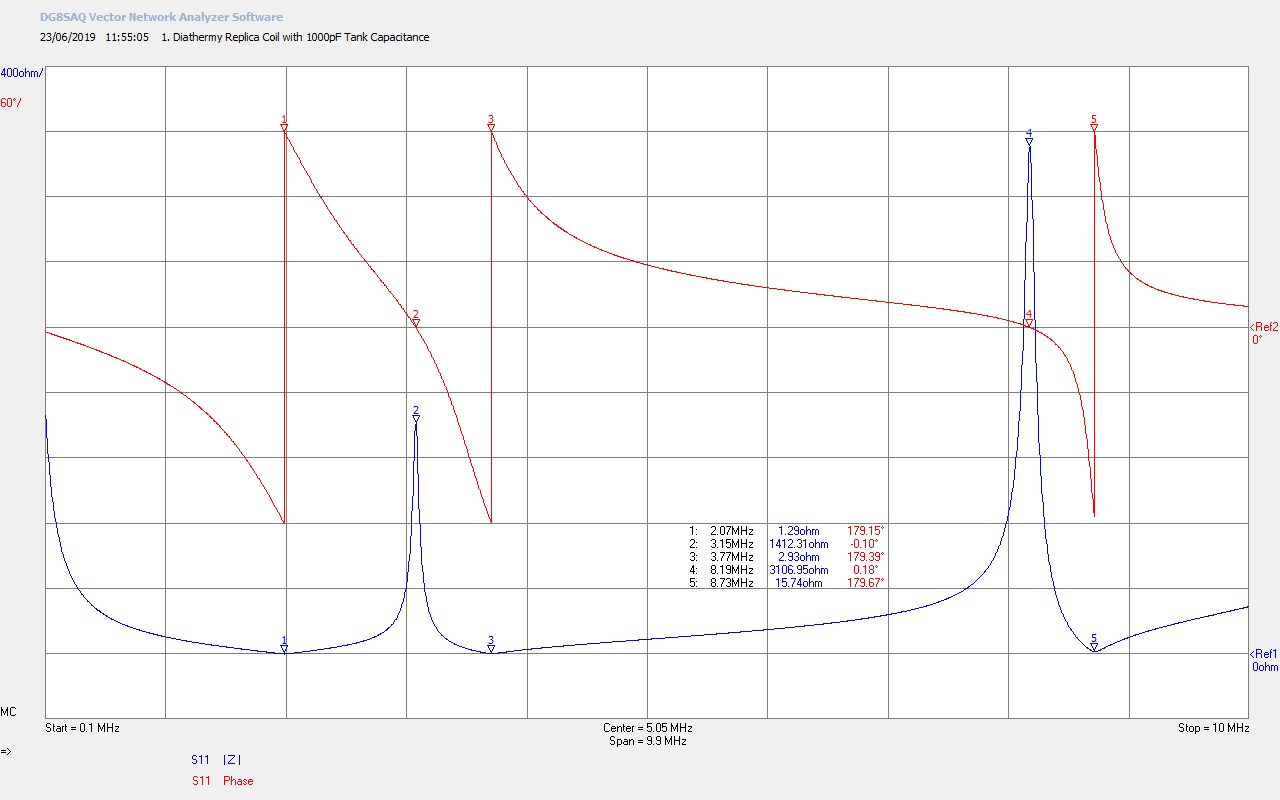
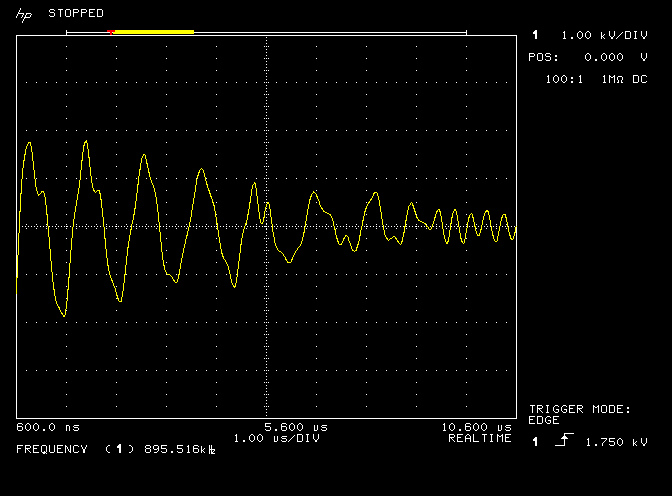
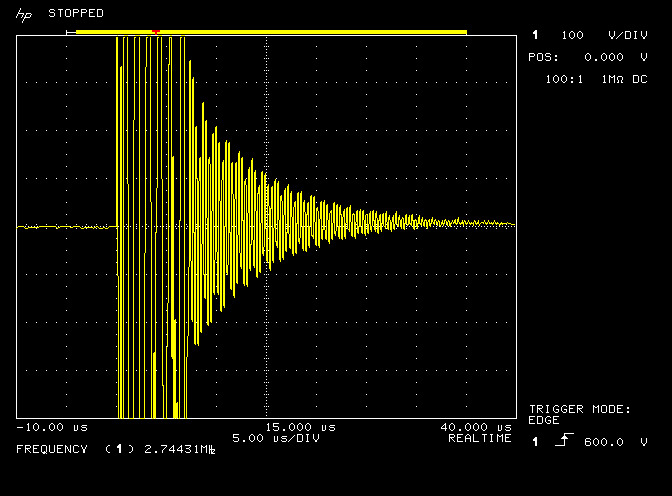
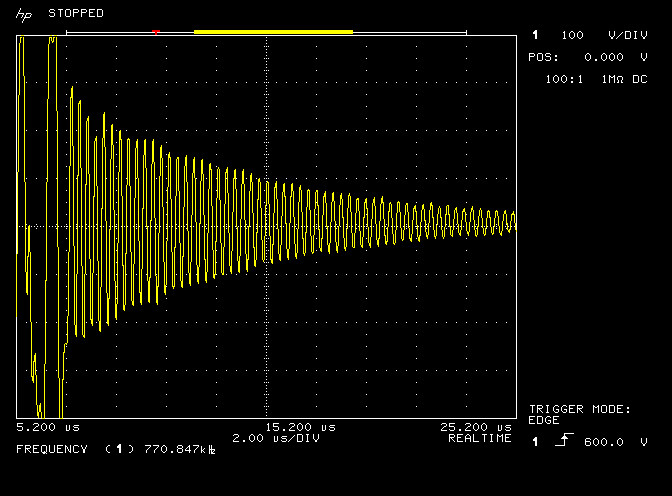
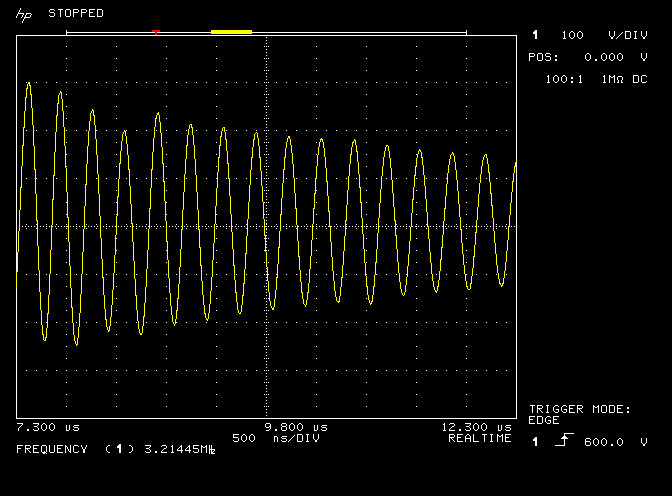
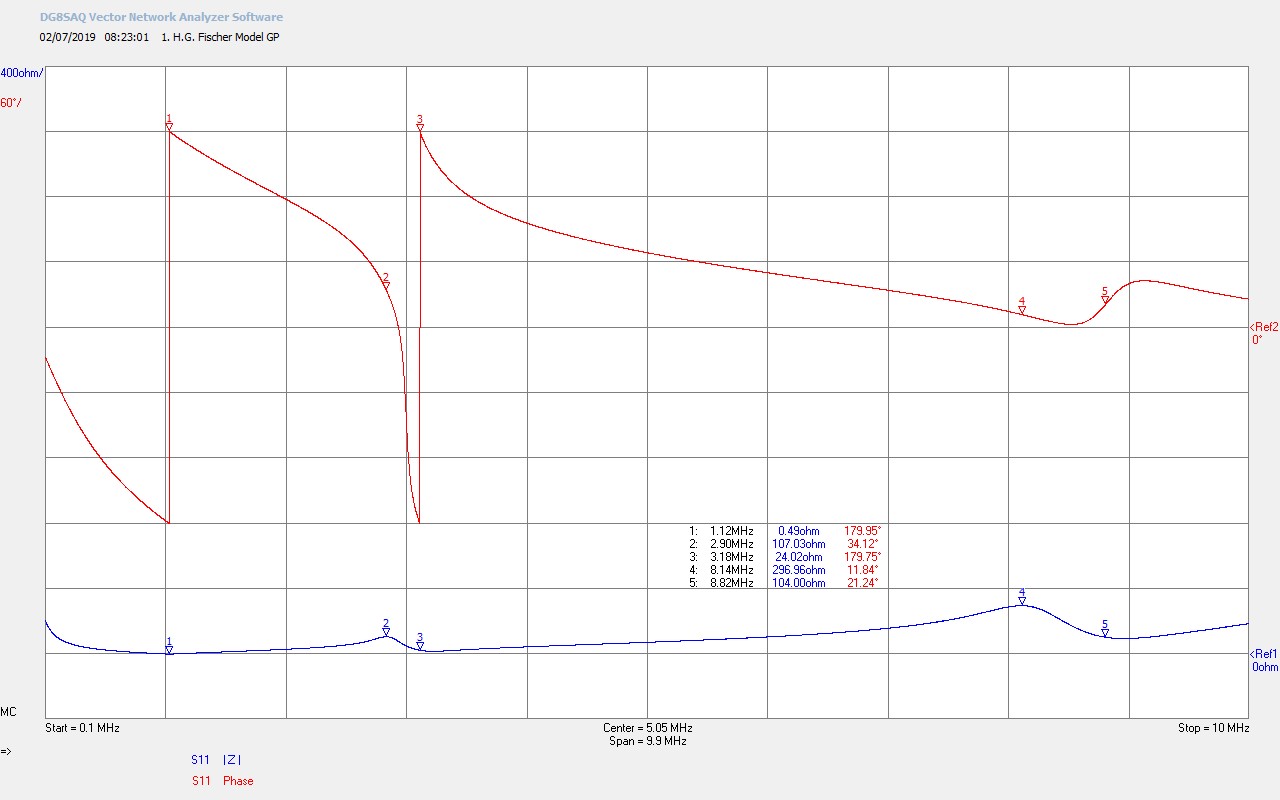
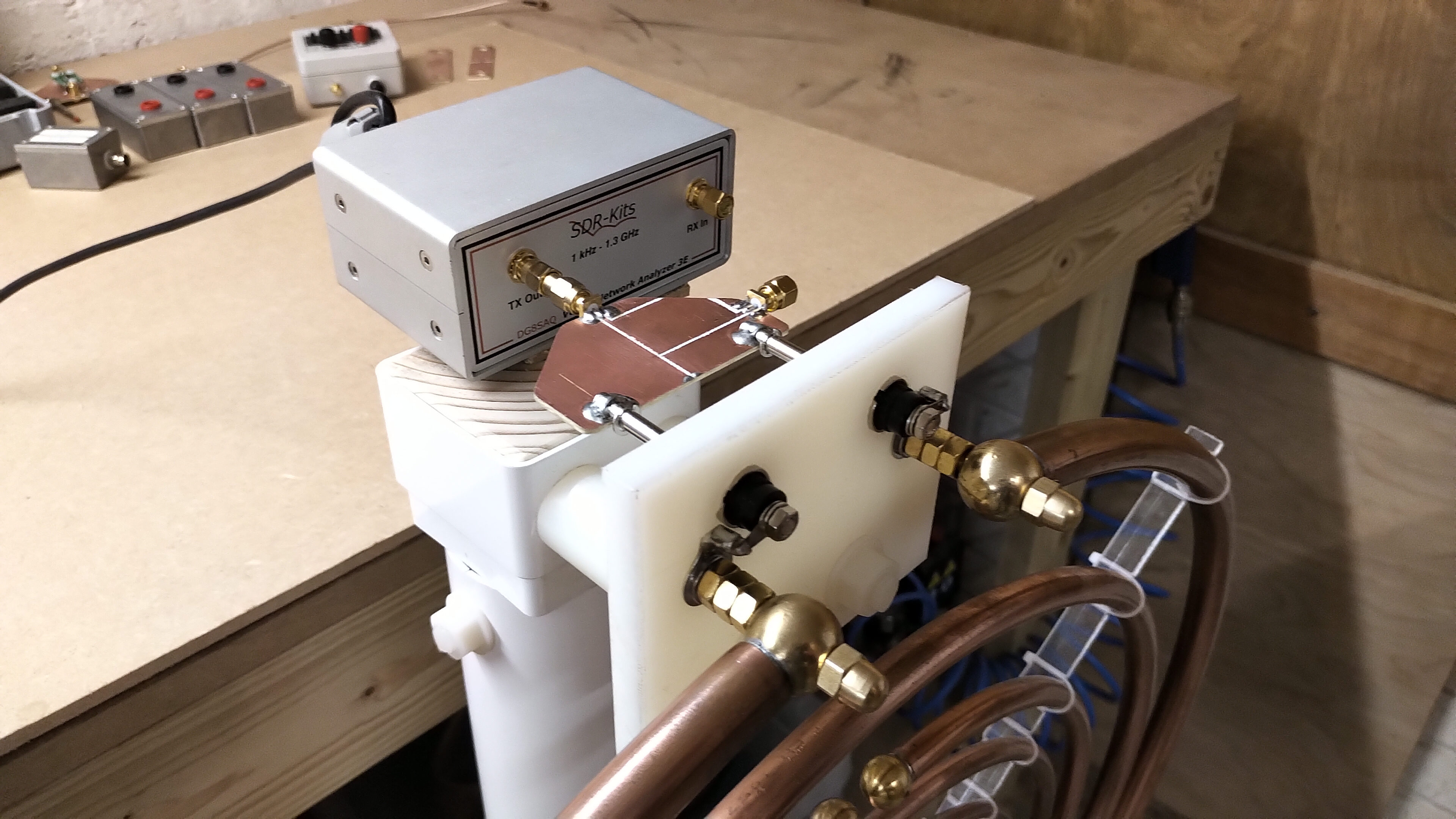
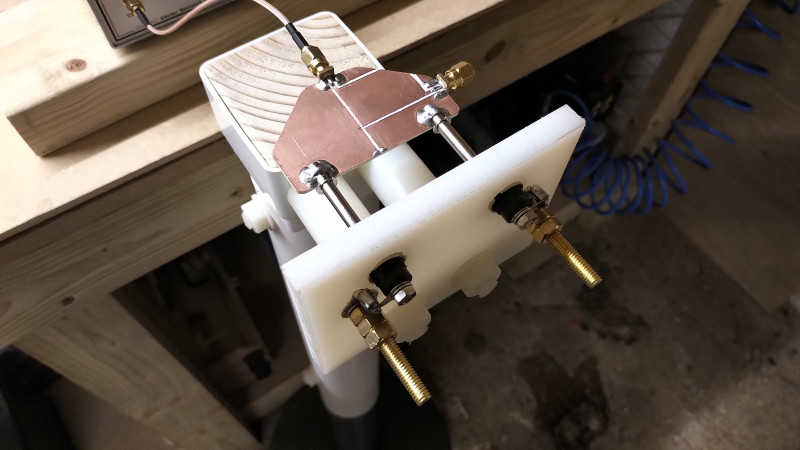
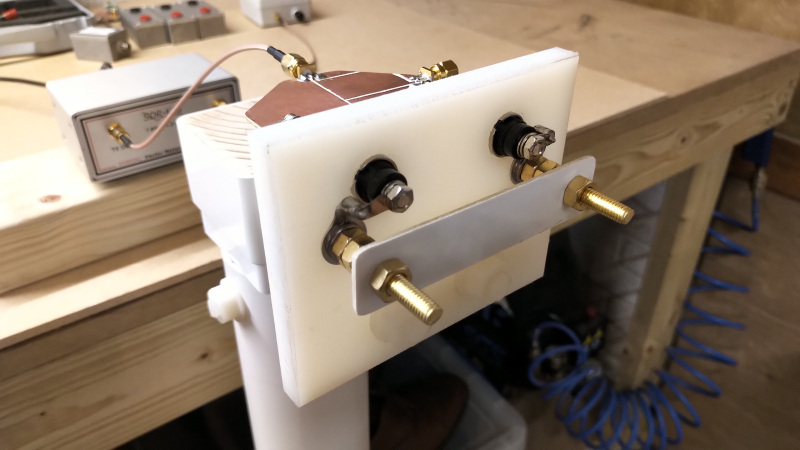
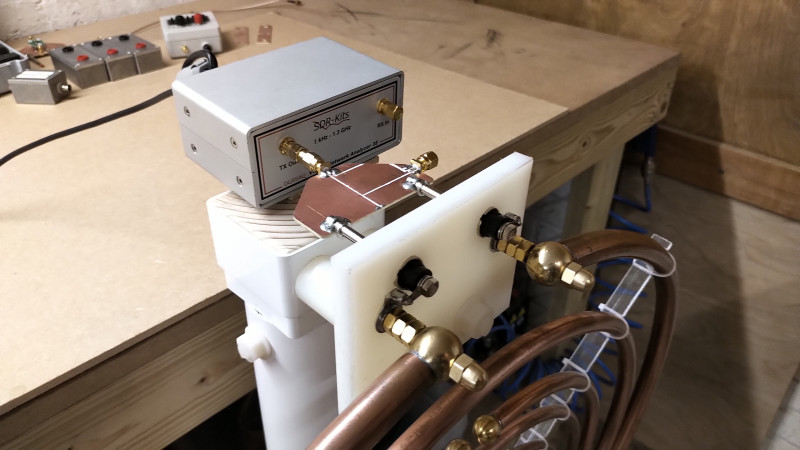
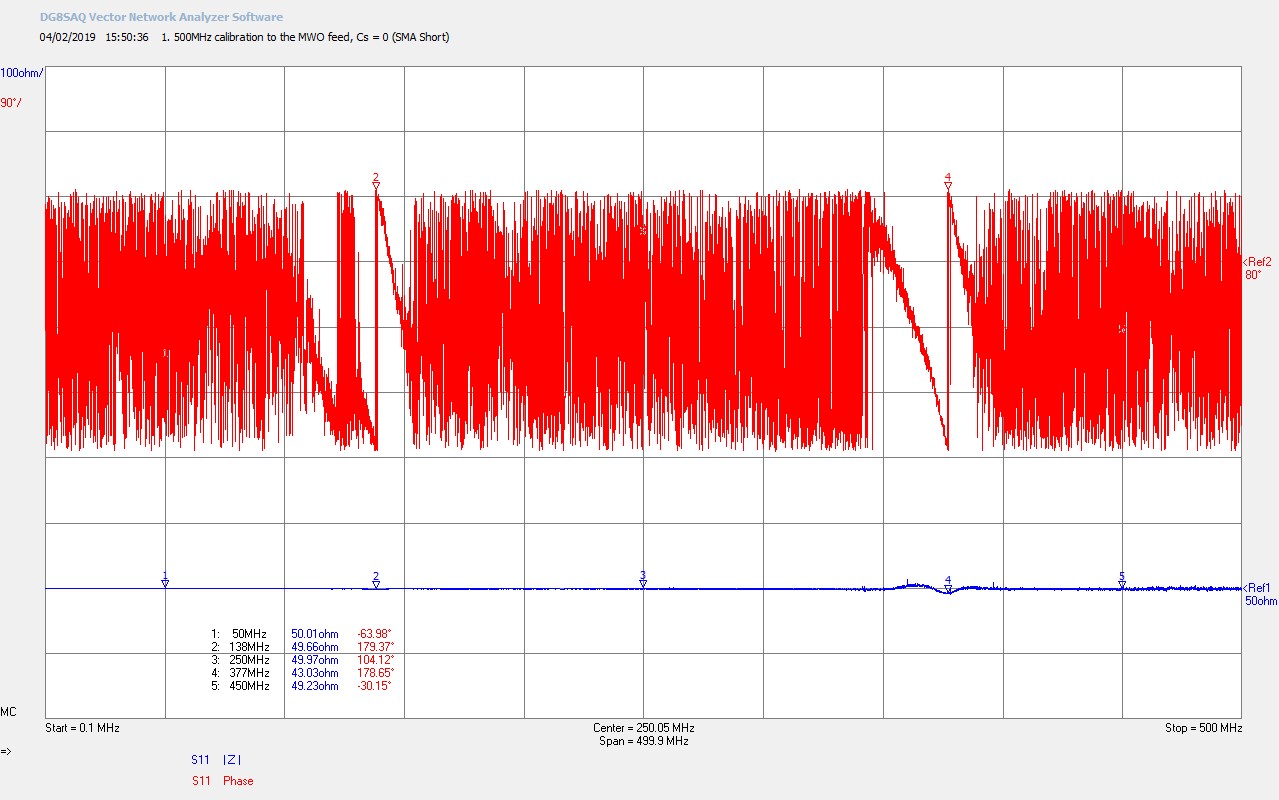
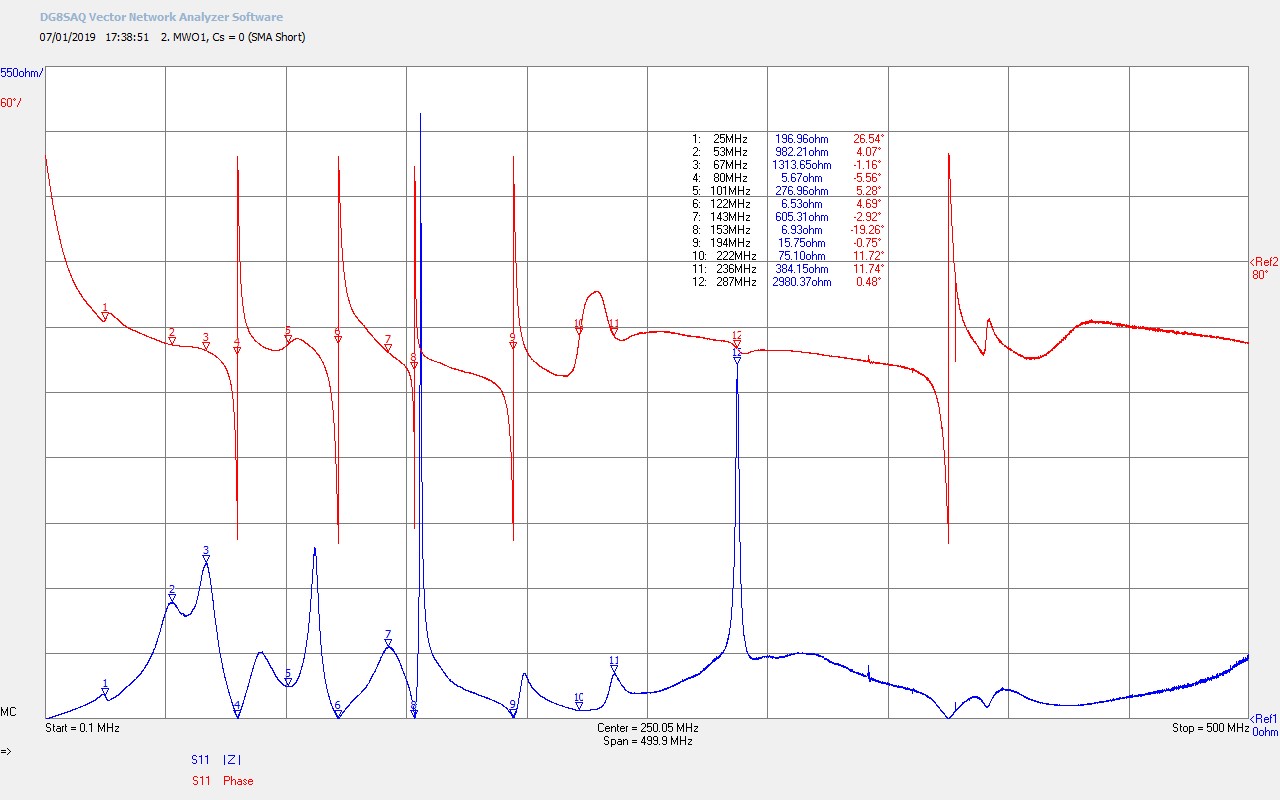
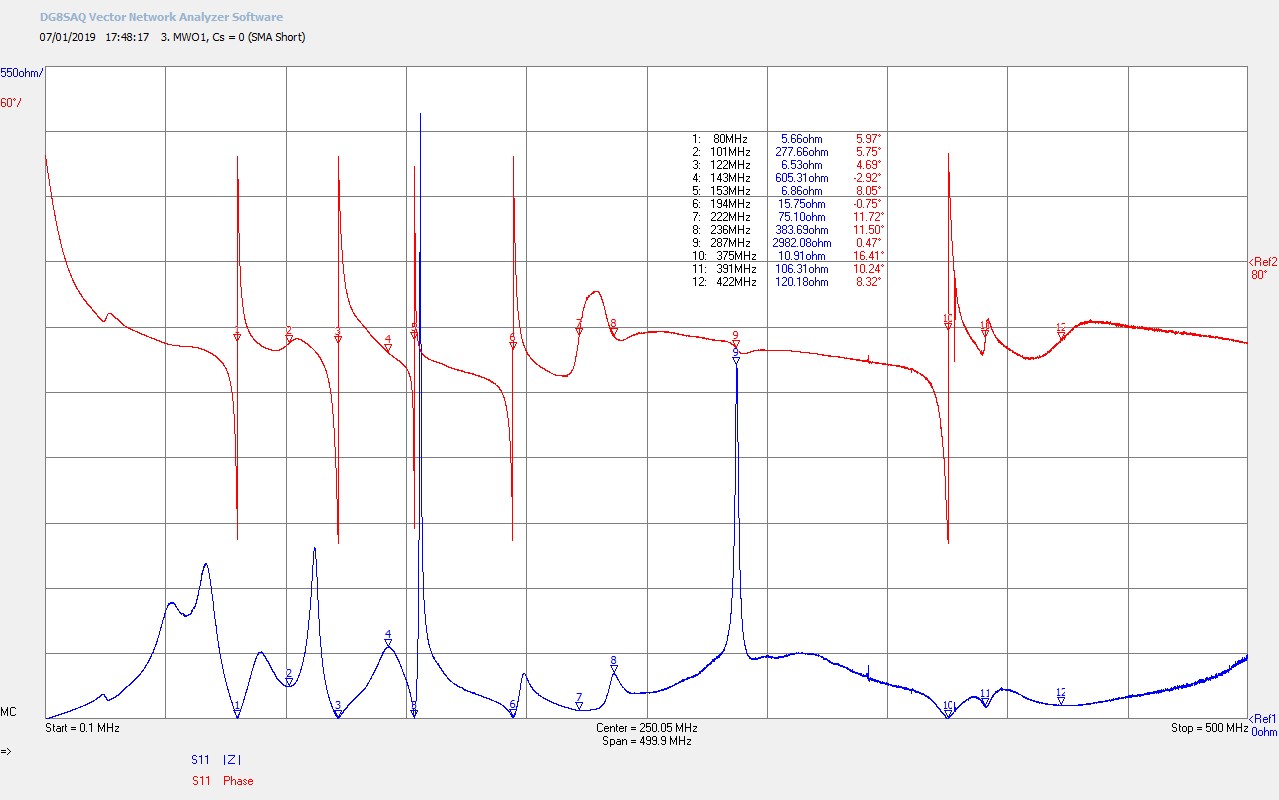
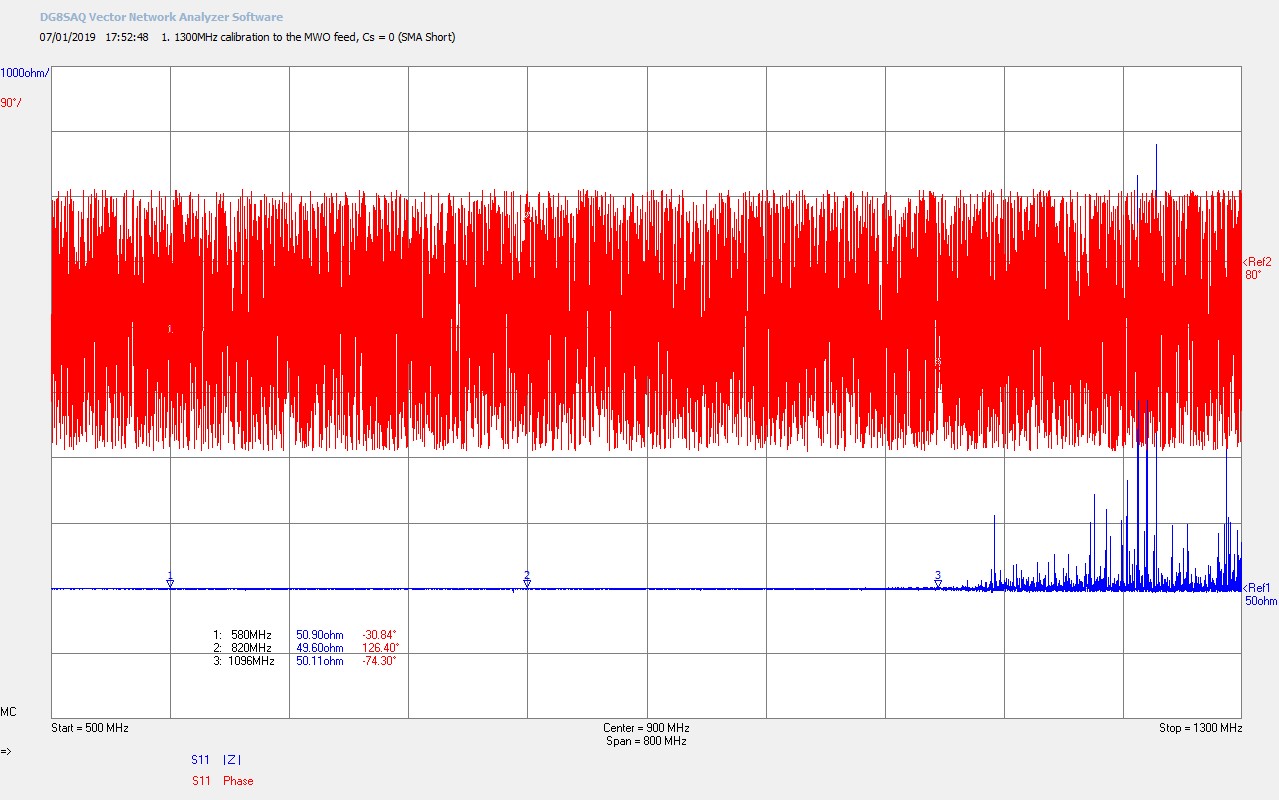
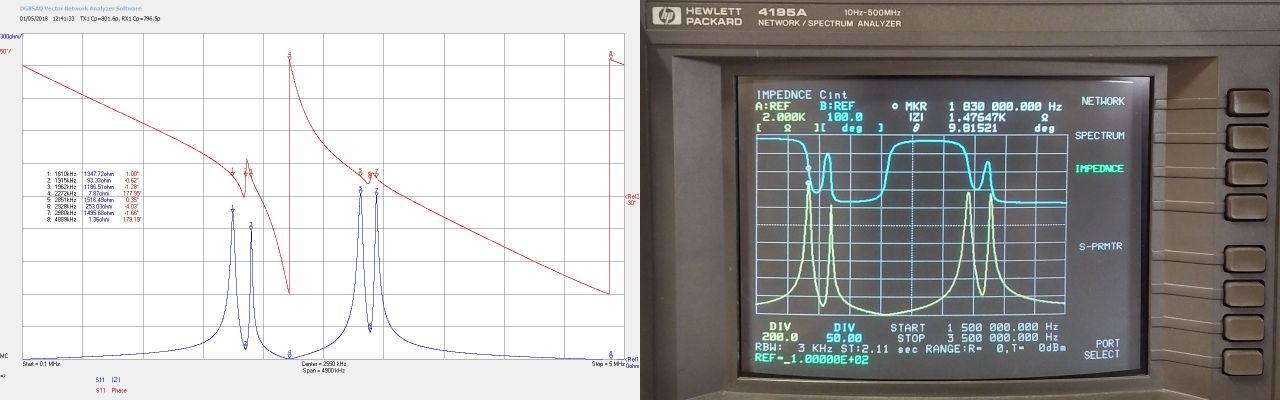
Figures 3 below show the small signal impedance measurements for Z11 for the TCS coils, and also the tuning measurements for the coils and spark gap generator together, which were taken throughout the endeavour and used to ensure a well tuned match between the generator and the TCS experiment.
To view the large images in a new window whilst reading the explanations click on the figure numbers below, and for a more detailed explanation of the mathematical symbols used in the analysis of the results click here. For further detail in the analysis and consideration of Z11 typical for a Tesla coil based system click here.
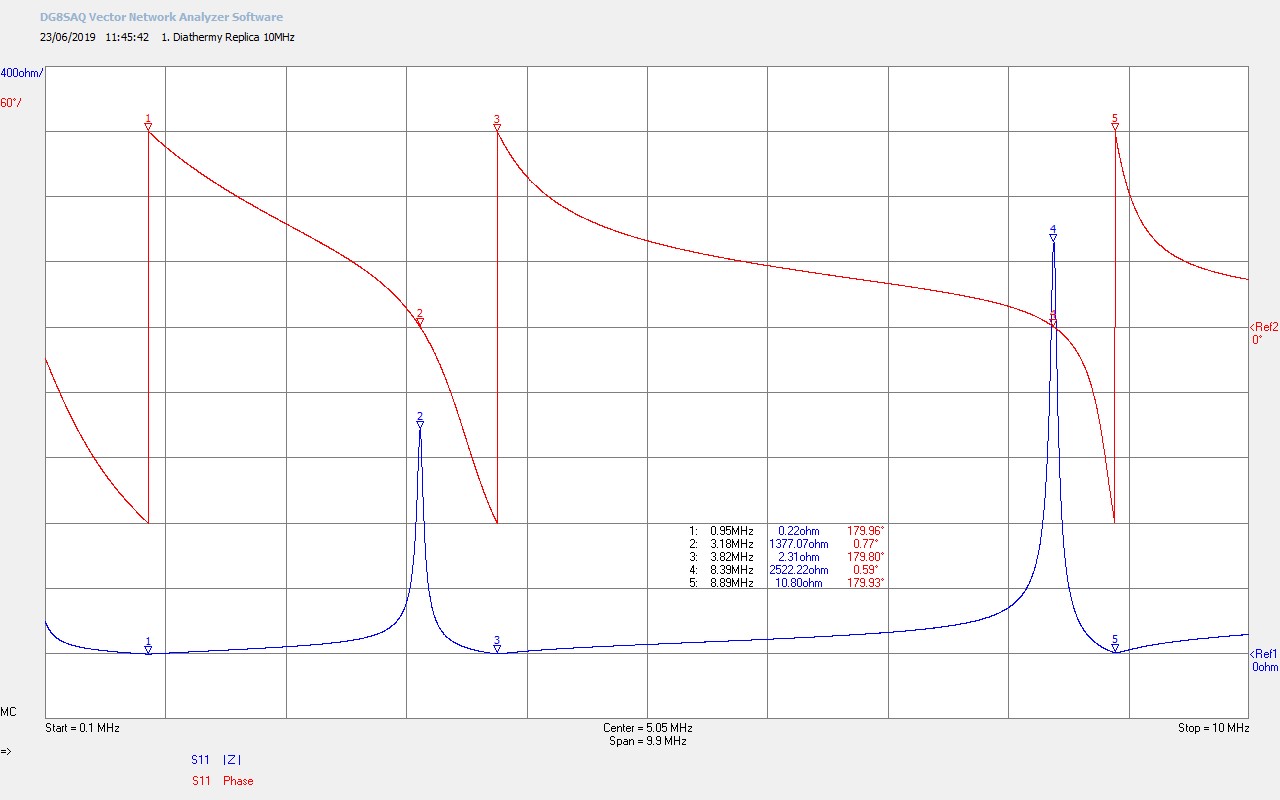
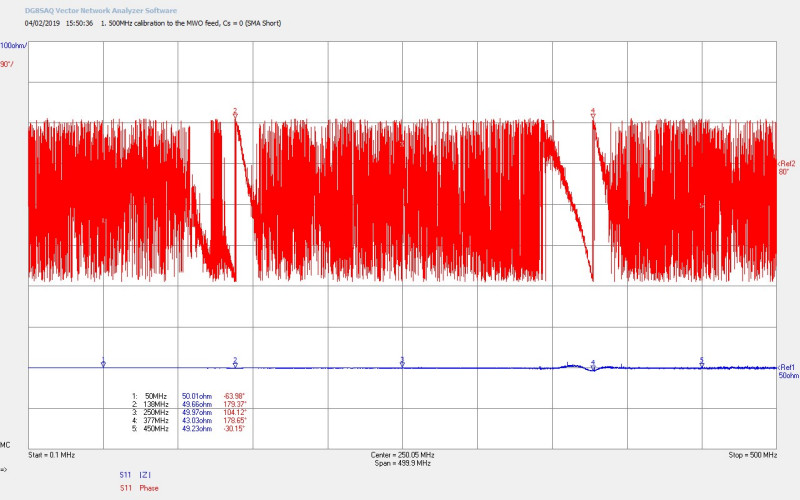
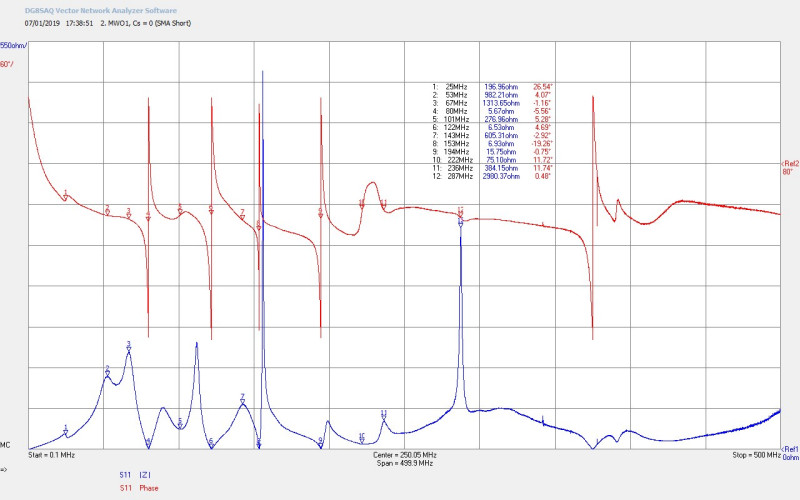
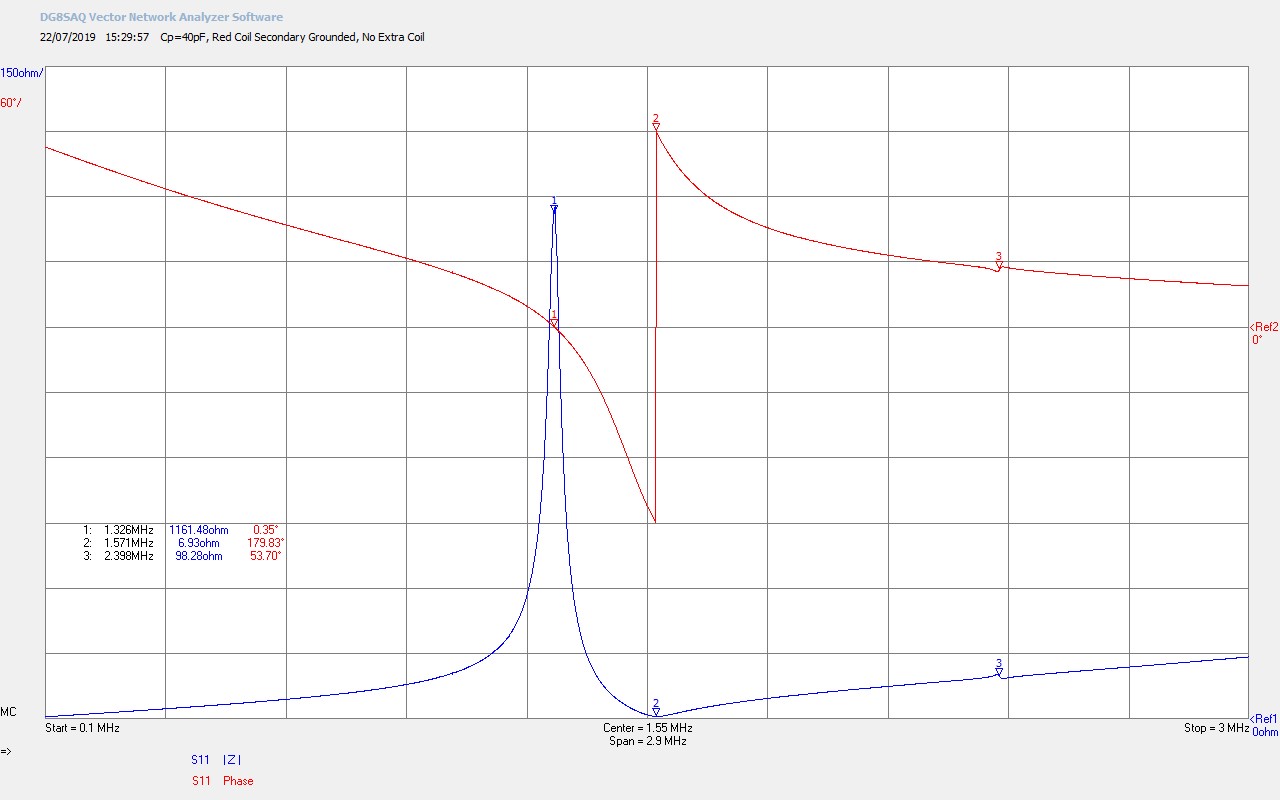
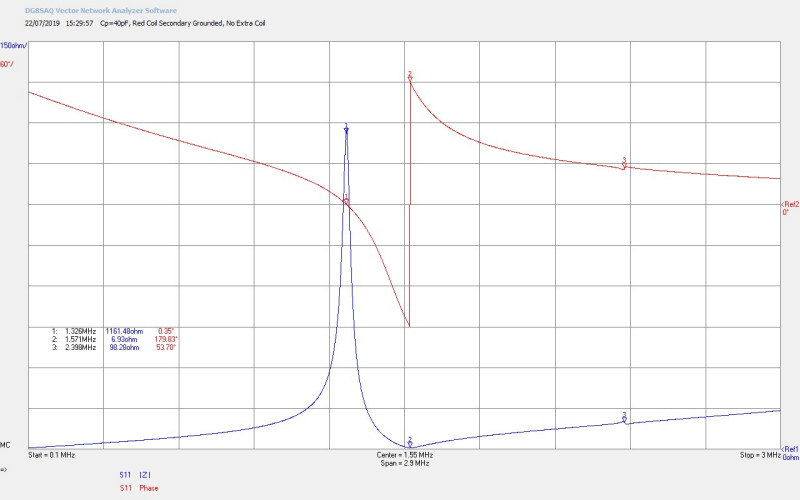
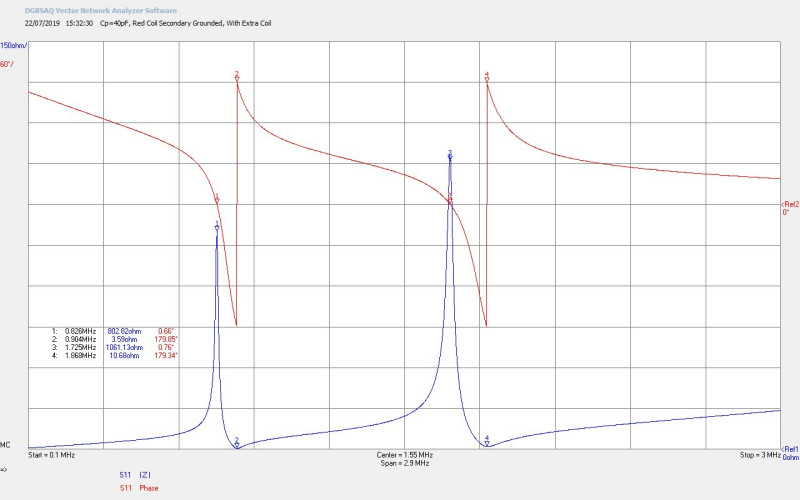
Fig 3.1. Shows the impedance measurements for the RTC with the secondary grounded, the extra coil disconnected, and where the primary tank capacitance has been arranged to be series CP = 40pf, which puts the primary resonant frequency FP at a much higher frequency and far away from the secondary. This would be the proper drive condition for the original linear amplifier generator (LAG) where FP is not arranged to be equal to FS. For the spark gap generator (SGG) it is necessary to match FP as closely as possible to the combined resonant frequency of the secondary and the extra coil together. The fundamental parallel resonant frequency of the secondary Fs at M1 = 1326kc/s, and as is to be expected with this form of air-cored coil, the FØ180 or series resonant point at which a 180° phase change occurs, is at a higher frequency at 1571kc/s at M2. At M3 = 2398kc/s a tiny resonance is being coupled from the disconnected extra coil which, being mounted in the centre on axis with the secondary, is close enough to have a non-zero coupling coefficient, and hence show some slight resonation reflected into the measurement.
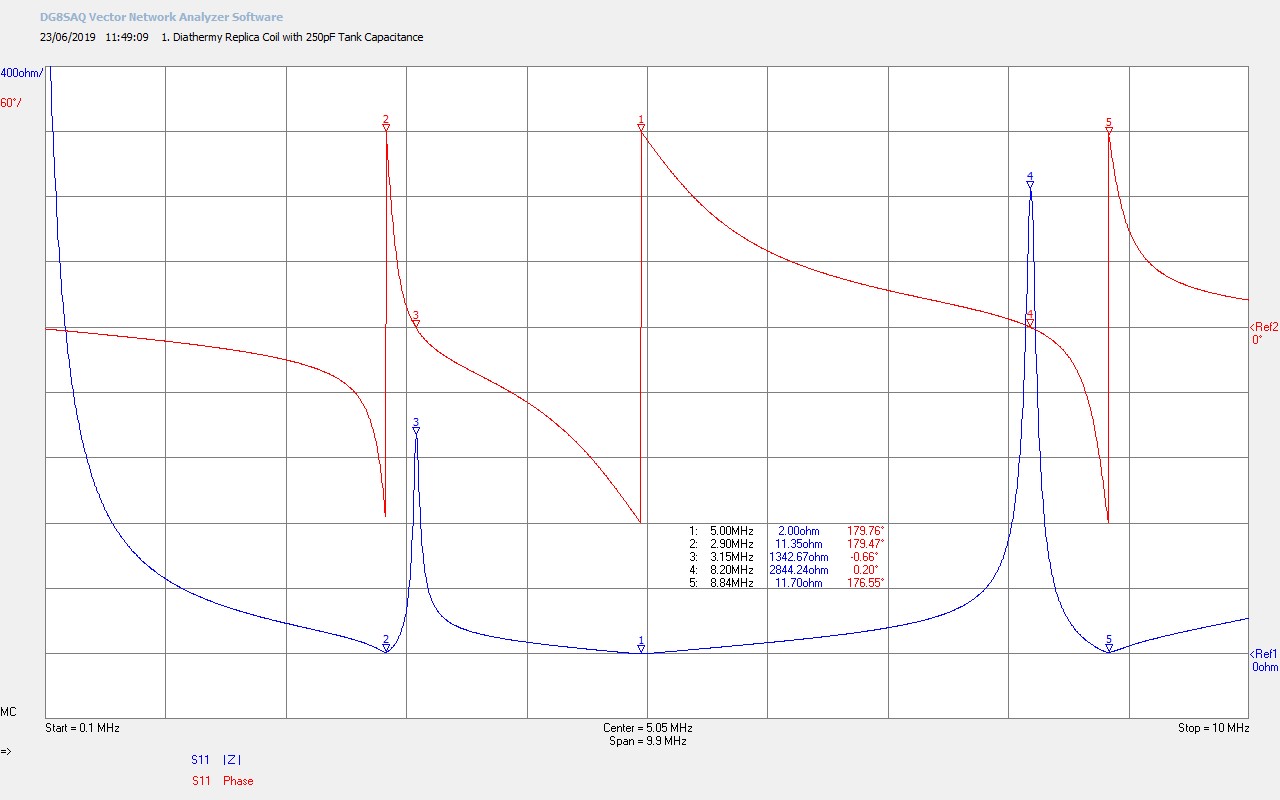
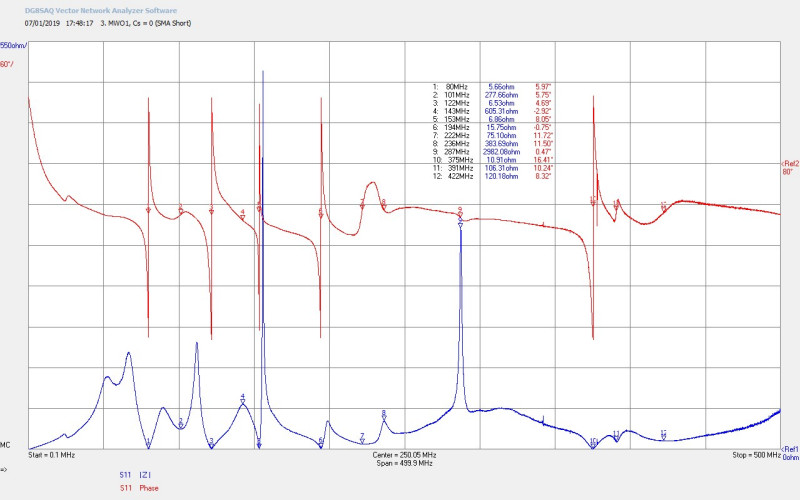
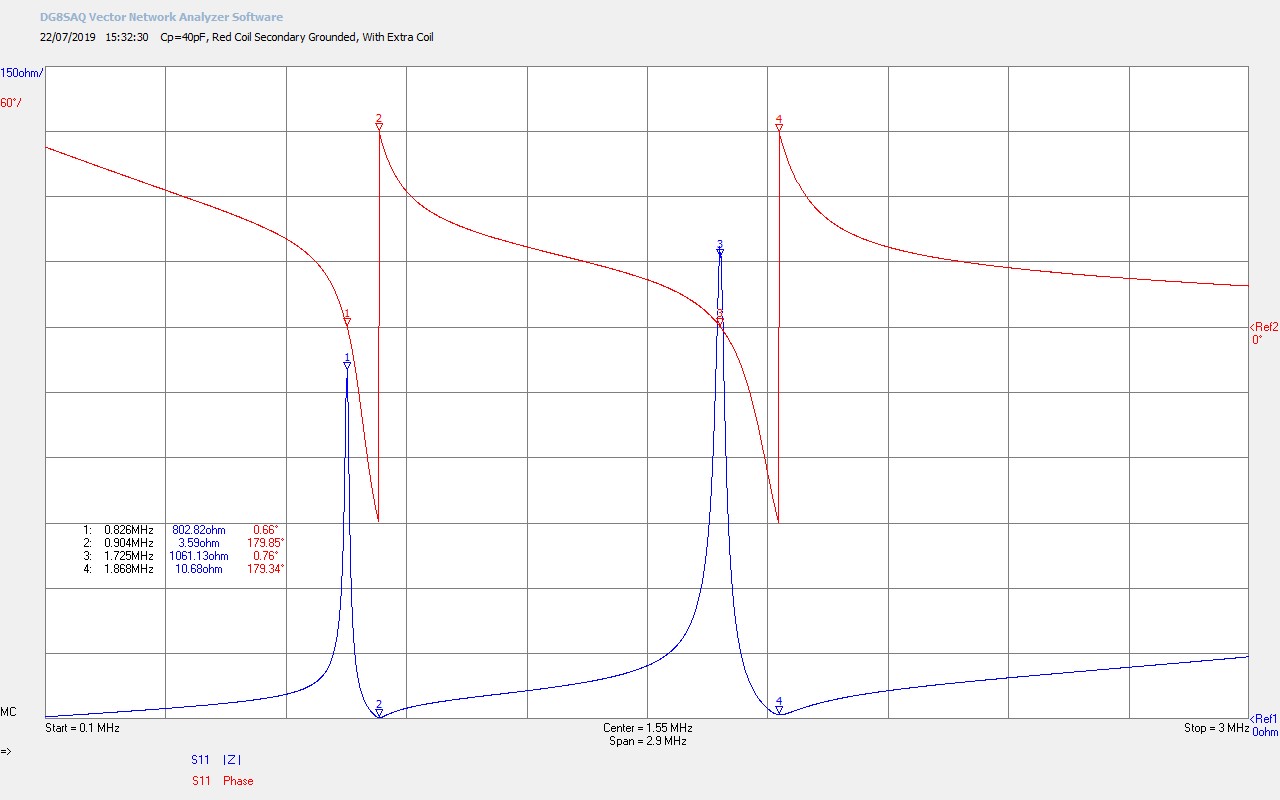
Fig 3.2. Here the extra coil has been reconnected and two resonant features can be noted, the lower from the secondary, and the upper from the extra coil. The effect of the coupled resonance between the two coils with a non-zero coupling coefficient is to push the secondary resonance down in frequency to where the FS at M1 is now at 826kc/s which is very close to the original drive frequency of the linear amplifier generator at 848kc/s. The fundamental resonant frequency of the extra coil, (now in λ/4 mode with one end at a lower impedance connected to the secondary, and the other connected to the high impedance of the extendable aerial), at M3 is now 1725kc/s
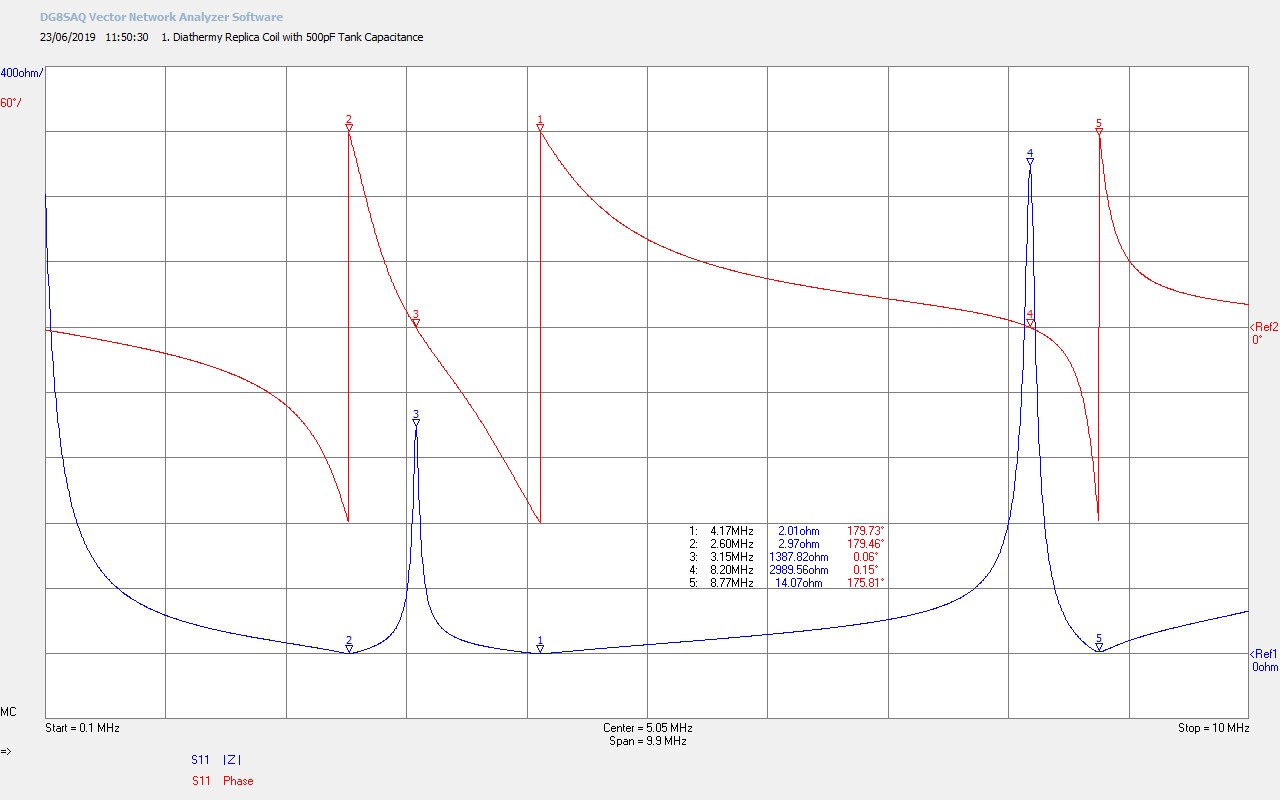
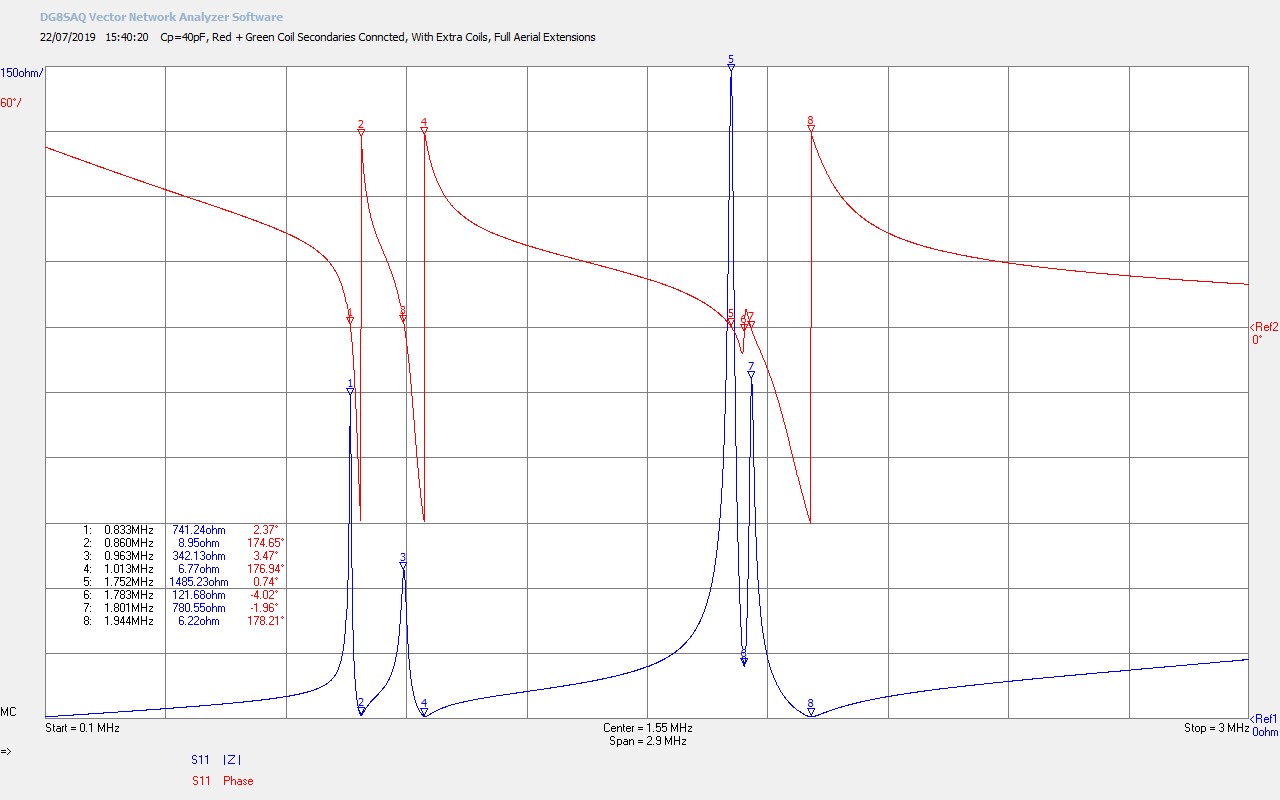
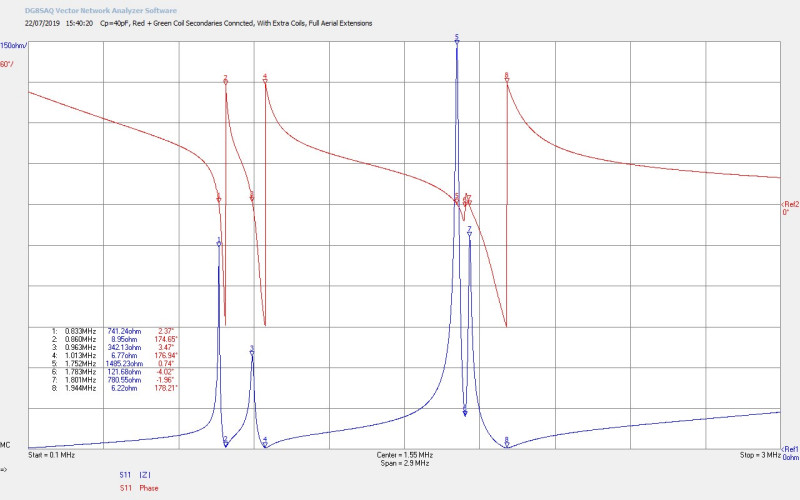
Fig 3.3. Here both the RTC and GRC have been connected together to complete the overall system, and where the bottom end of both secondaries are connected together by a single wire transmission line. Both the RTC and GRC have their extra coil adjustable extensions fully extended. It can be seen that both the secondary and extra coil resonant frequencies have been split in two, to reveal four resonant frequencies from the four main coils, 2 in the RTC, and 2 in the GRC. The markers at M1 at 833kc/s and M3 are due to the secondary resonance in the RTC and GRC respectively, and the markers at M5 at 1752kc/s and M7 at 1801kc/s are due to the extra coils. It can be noted that the impedance of the RTC and GRC are not well-balanced the resonance is stronger on the RTC side where |Z| at M1 ~ 741Ω, and M3 ~ 342Ω. During running operation with either the LAG or SGG this would result in more energy stored in the RTC coil, the standing wave null on the single wire transmission line would be pushed away from the RTC and towards the GRC, and less power would be available at the output of the primary in the GRC.
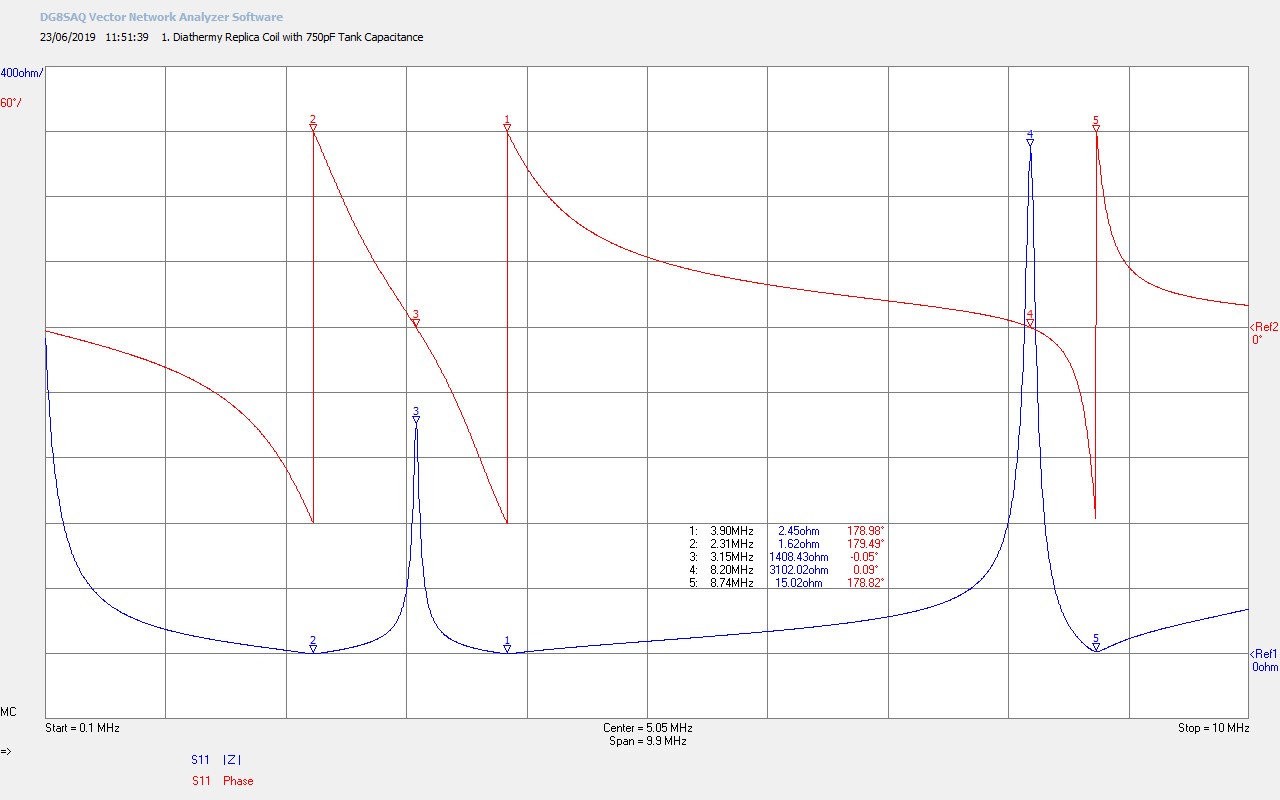
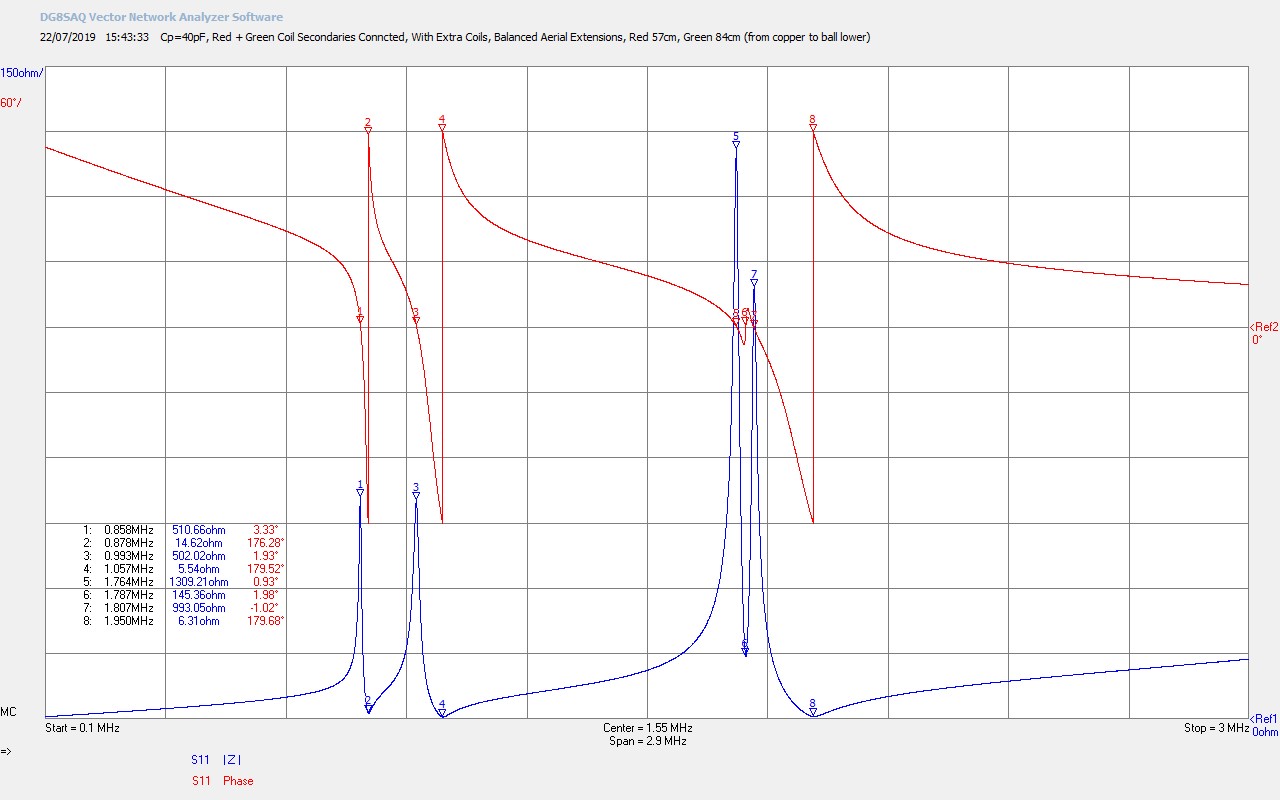
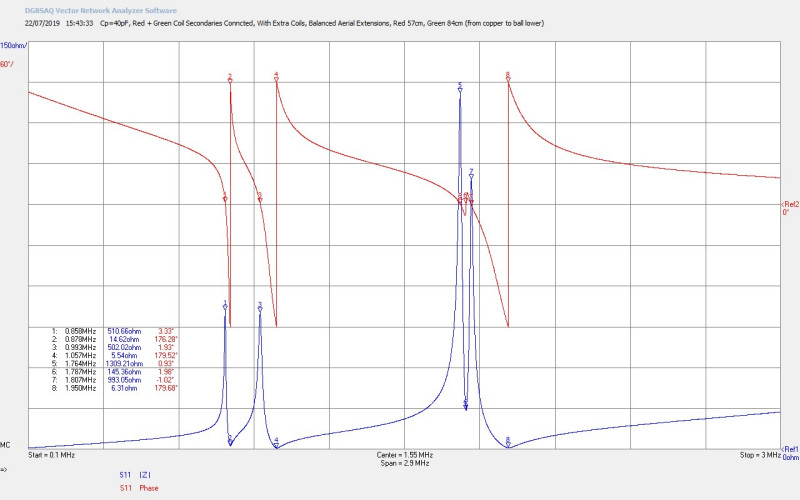
Fig 3.4. Here the lengths of the extra coil extensions have been adjusted to balance |Z| at M1 and M3 at ~500Ω. The RTC extended length was 57cm, and the GRC extended length was 84cm, measured from the copper to aerial join, and to the base of the ball top load. With very fine adjustment, which is very difficult to accomplish, it may be possible to also balance |Z| for the extra coils at M5 and M7. This would result in the ideal balanced and equilibrium state, where the electric and magnetic fields of induction are balanced across the entire system, energy storage is equal, the null point is equidistant between the RTC and the GRC, and maximum power can be transferred between the two coils. In practice, when |Z| for the fundamental secondary resonance is equal, as shown, the overall system can be considered to be well-balanced, and will perform close to its maximum performance. Very slight adjustments to the drive frequency from the generator can then be used to nudge the system into the best overall balance and match. FS at M1 is now 858kc/s which is now close to the original drive frequency of the LAG at 848kc/s.
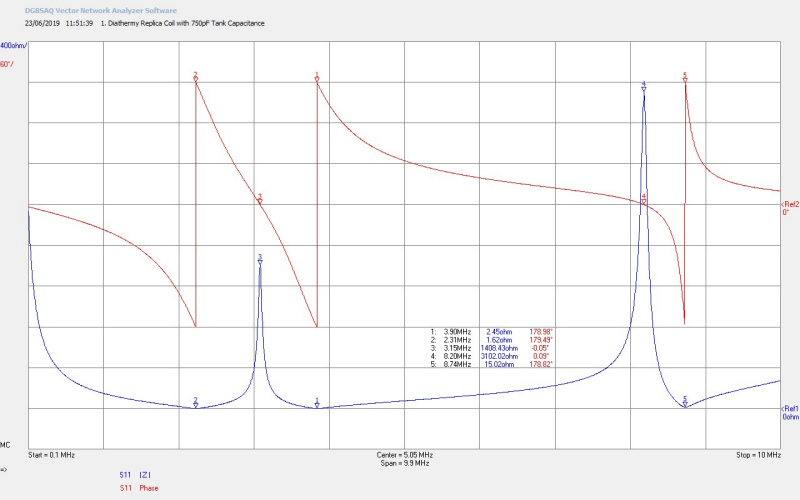
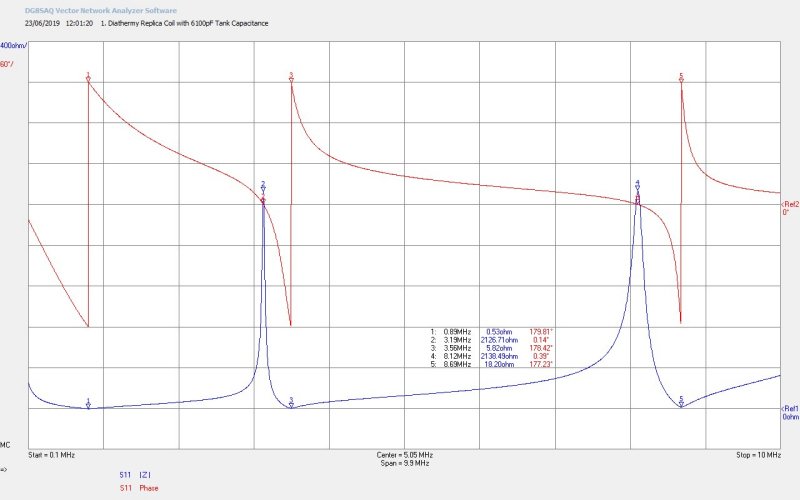
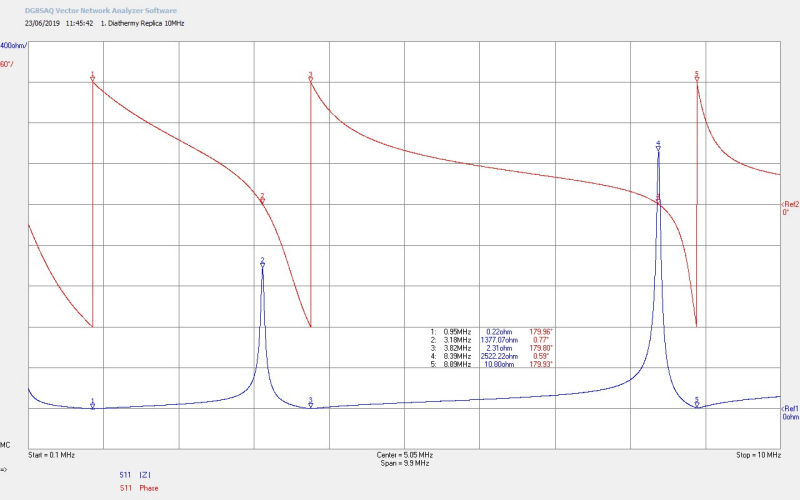
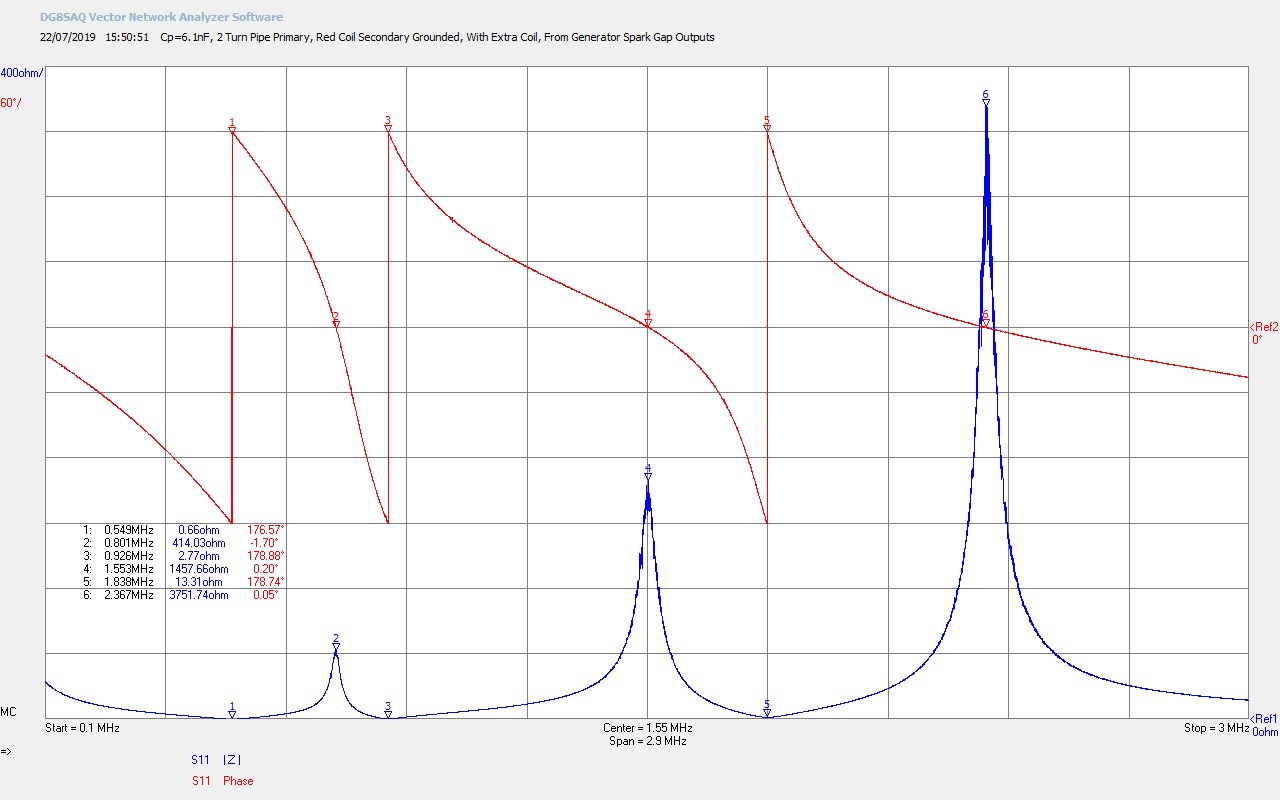
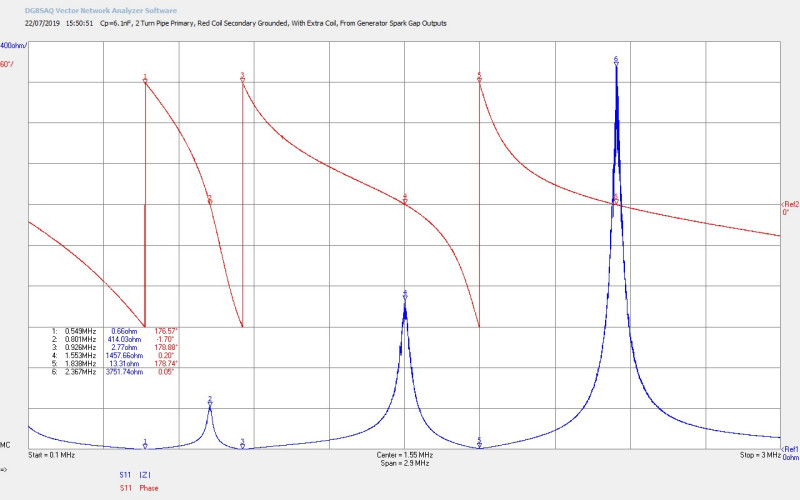
Fig 3.5. Shows the impedance characteristics of the RTC from the perspective of the SGG. The vector network analyser (VNA) is connected to the outputs of the spark gaps in the generator, so the characteristics include the tank capacitance of 6.1nF and the primary coil, which in this case is 2 turns of 1/4″ copper pipe. It can be seen that the resonant frequency of the primary FP is somewhat below FS as M1 at 549kc/s, and is moving away from M2 and M3. FS has also reduced to 801kc/s at M2 which also shows that the loading in the primary is too much. The inductance of the primary coil, or the tank capacitance, needs to be reduced in order to establish a better match between the generator and the RTC.
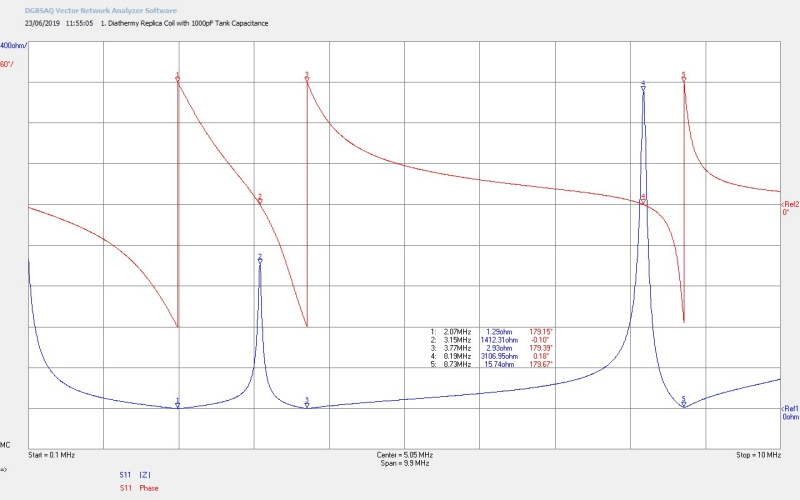
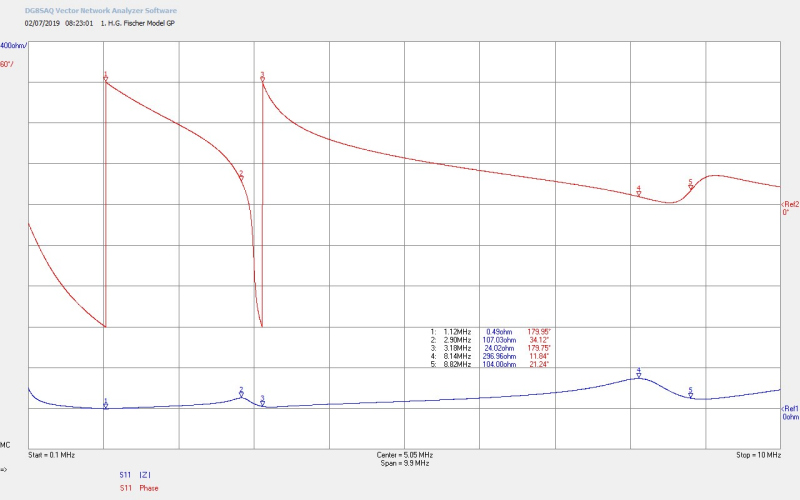
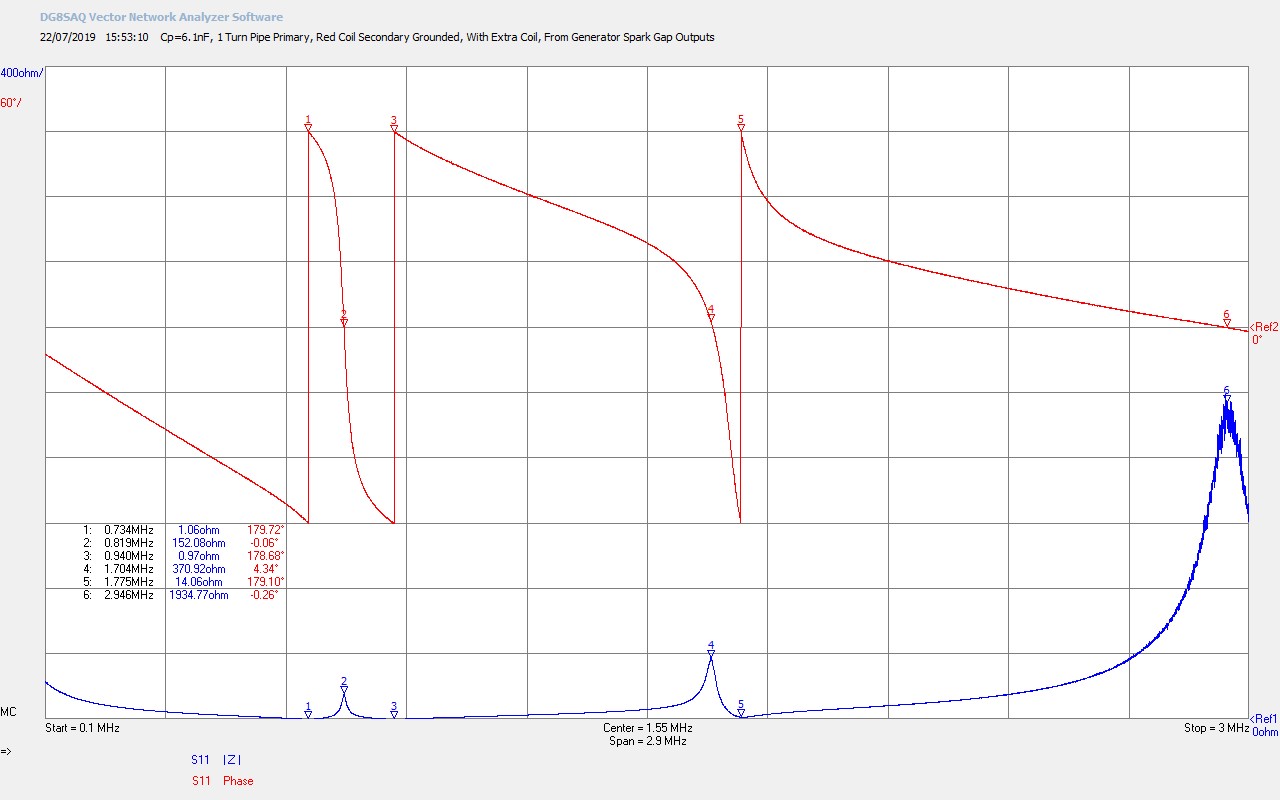
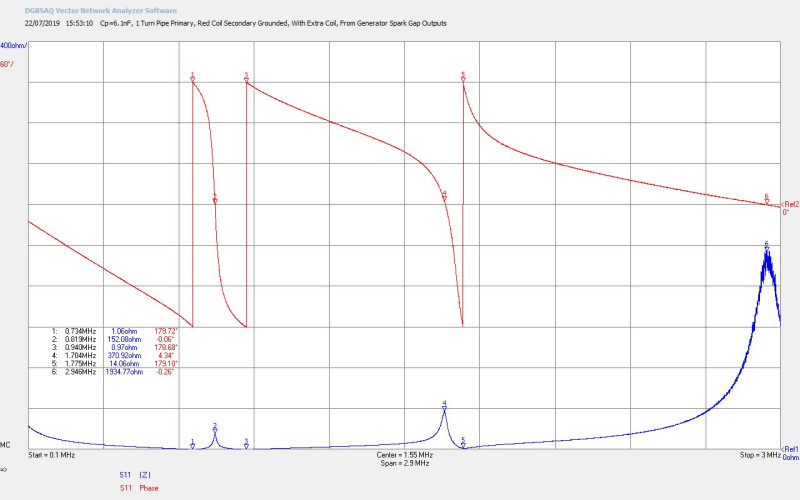
Fig 3.6. Here the number of turns of the primary has been reduced to one, which reduces the inductance in the primary resonant circuit with the generator. M1 is now closer to M2 and M3 and the FS has now increased to 819kc/s. The tuning between the generator and the RTC has now swung slightly the other way and the primary is pushing upwards on the secondary characteristics. This state is however a better state of tune than that shown in figure 3.5. It can also be seen that FE for the extra coil is cleaner and less impacted by the primary resonance. Additional fine tuning of the system would ultimately be accomplished by moving one side of the primary connection a certain distance around the circumference of the primary loop, (to form a fractional number of turns in the primary e.g. 1.4), and gain balanced and equidistant spacing for markers M1 and M3 from M2.
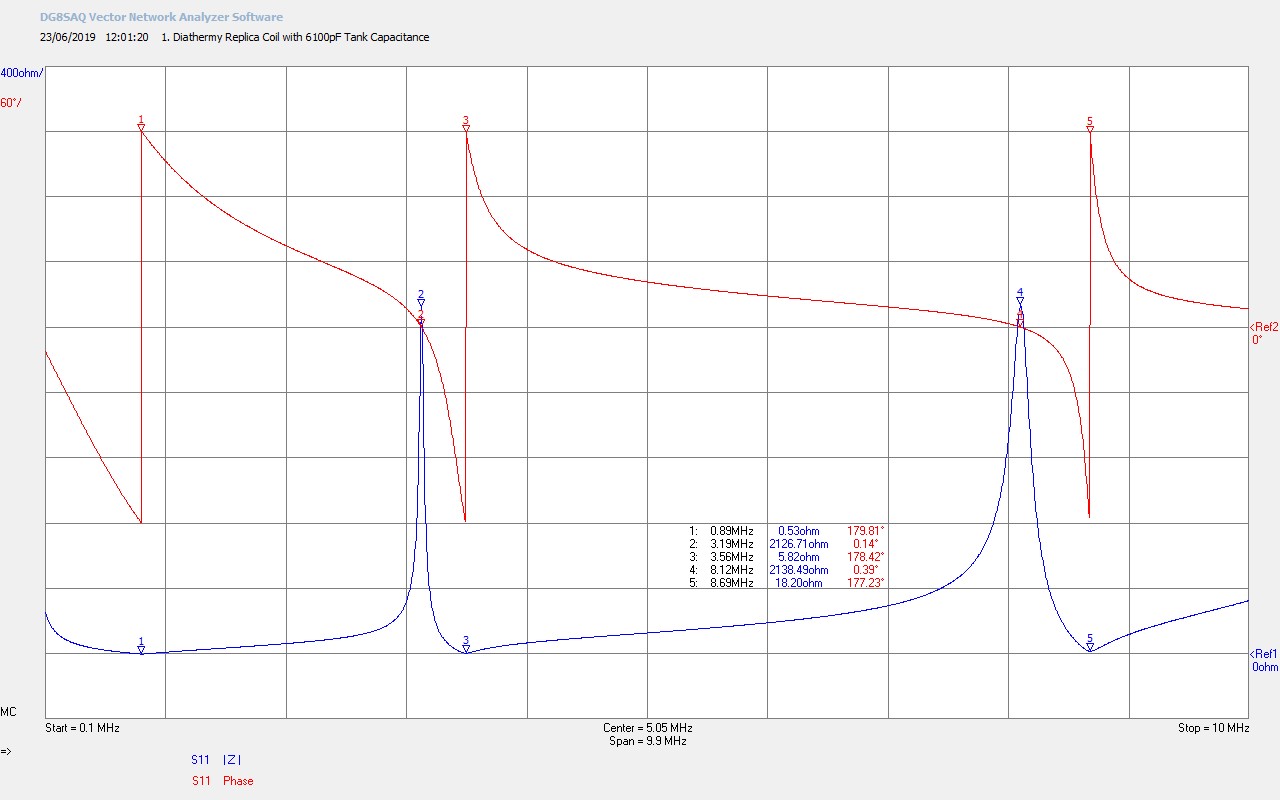
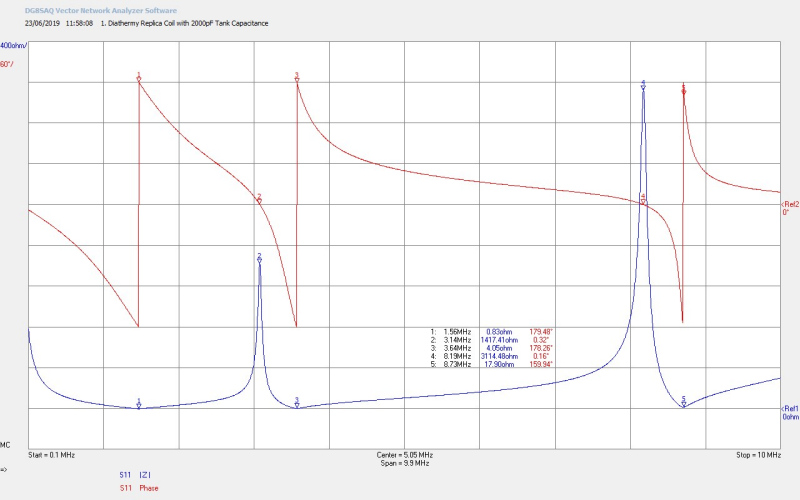
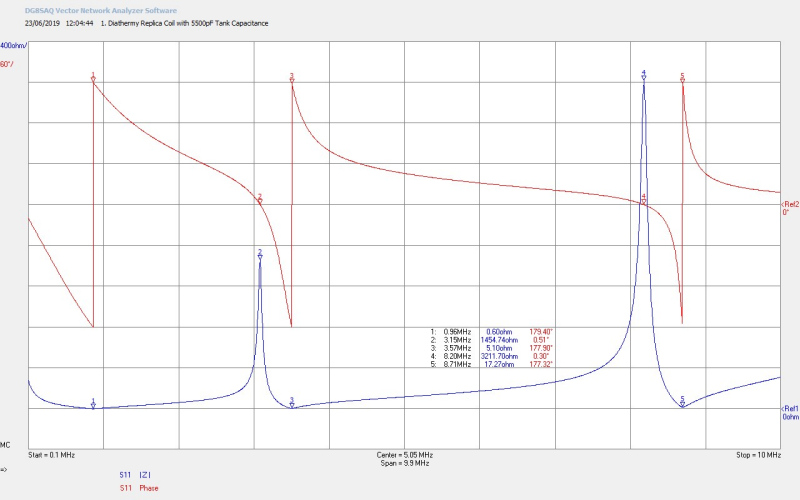
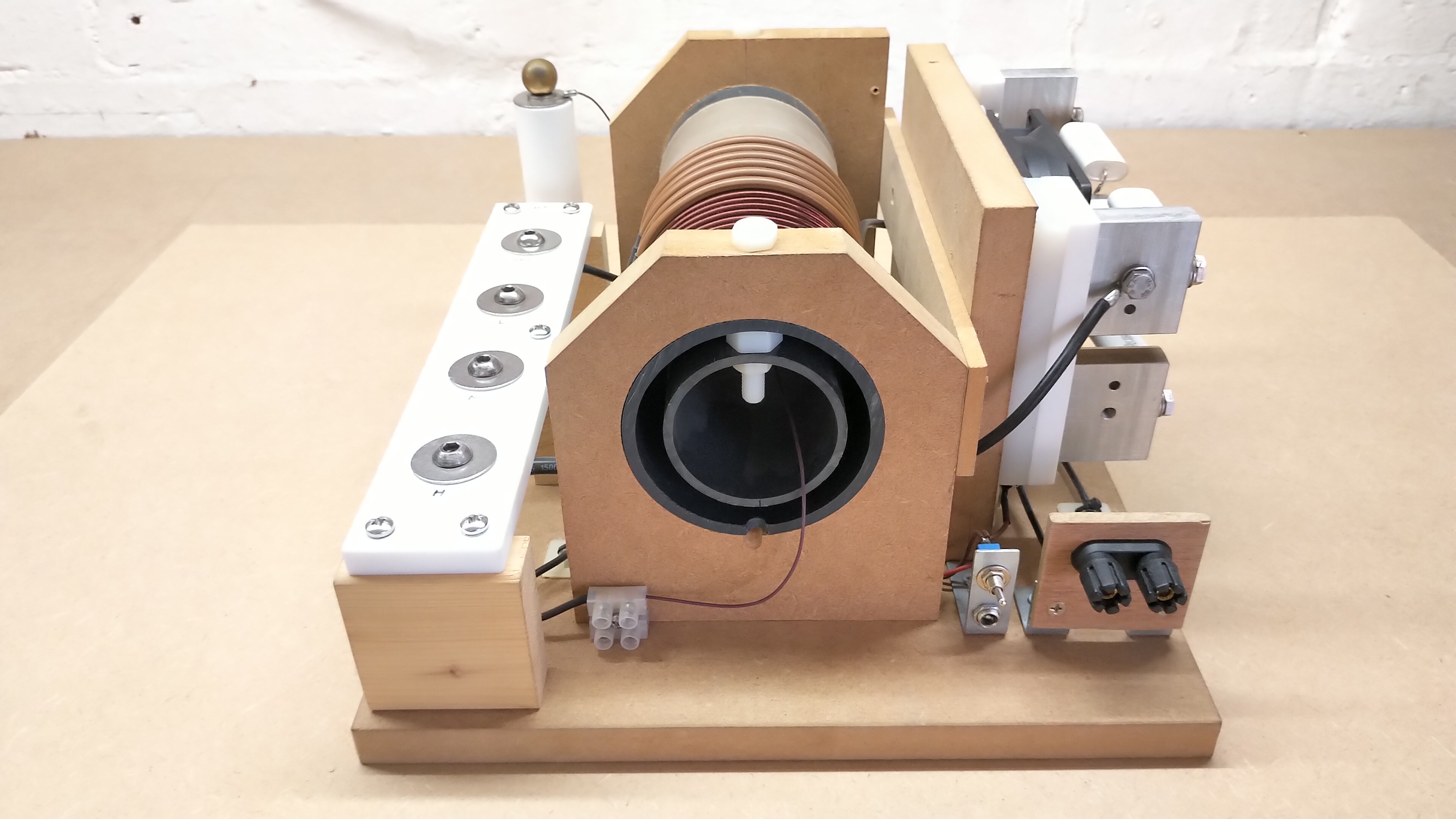
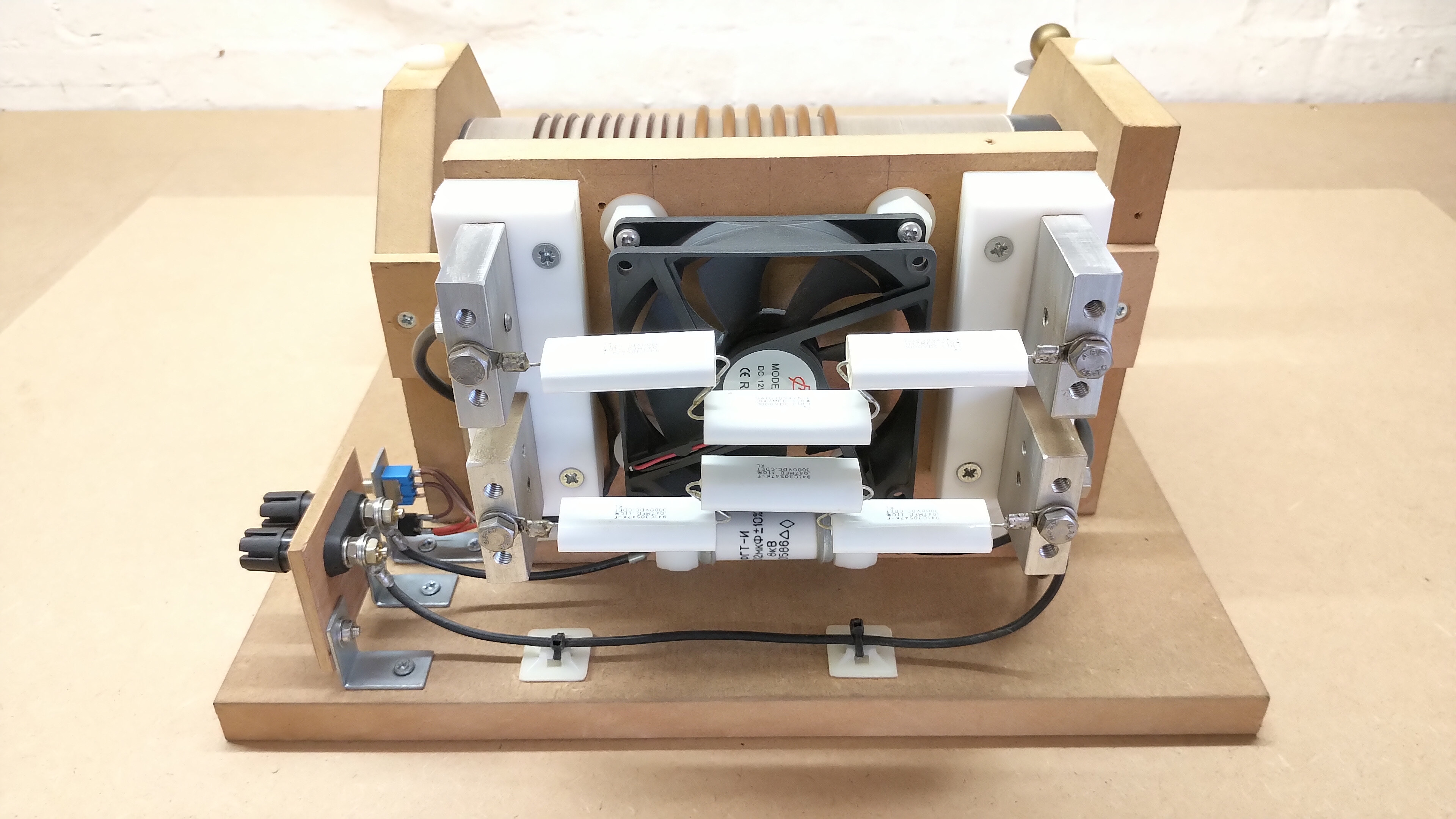
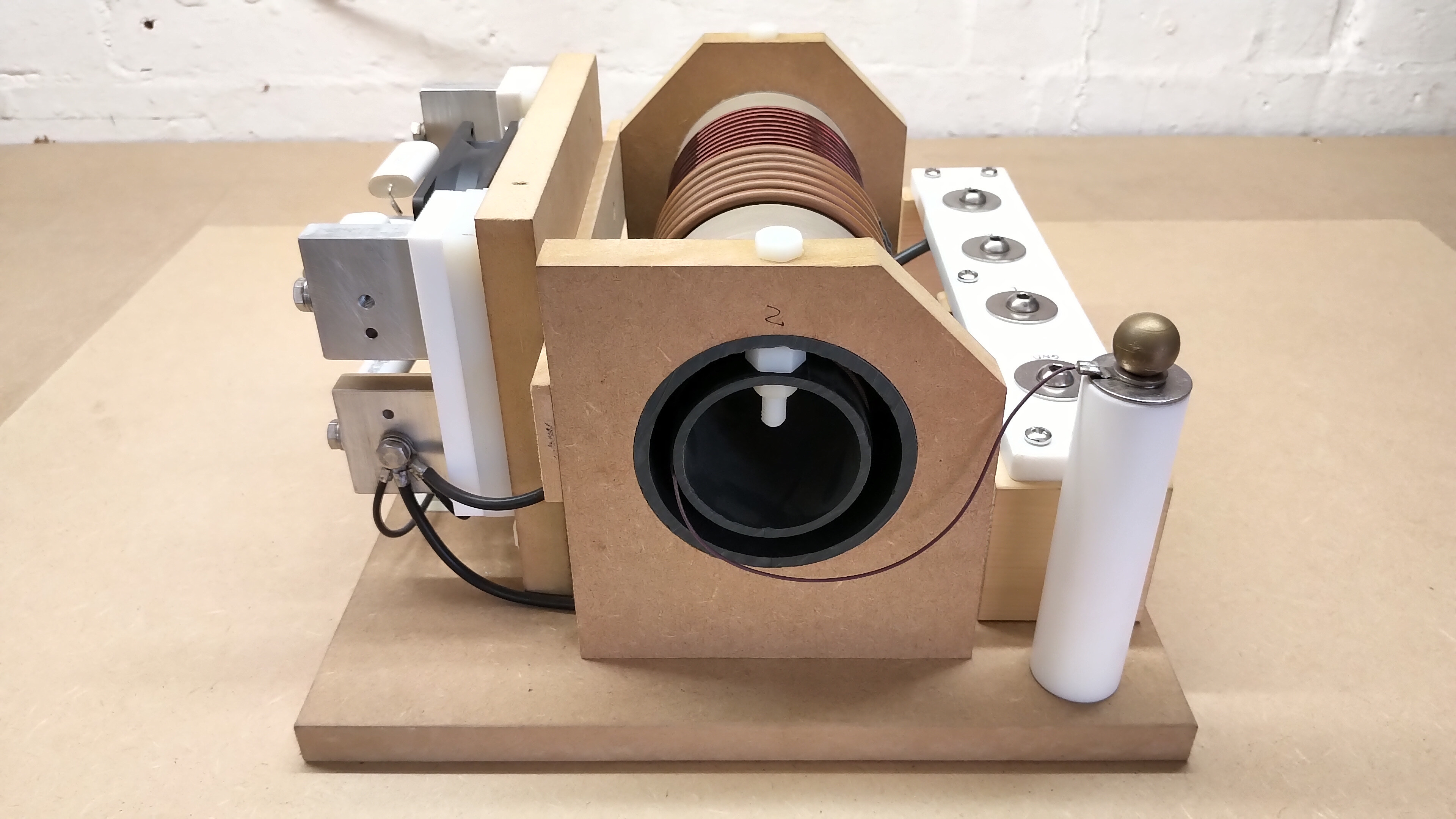
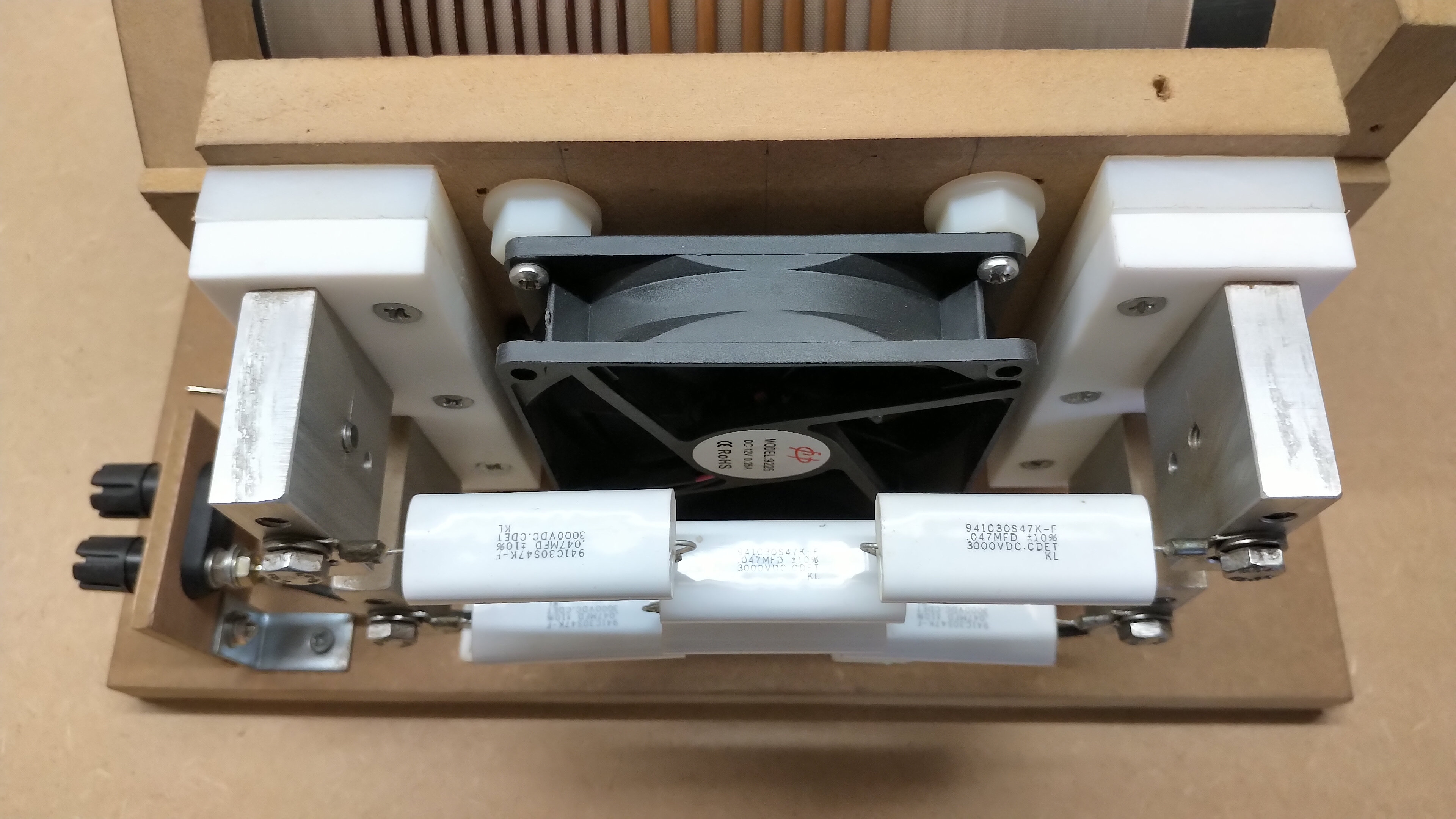
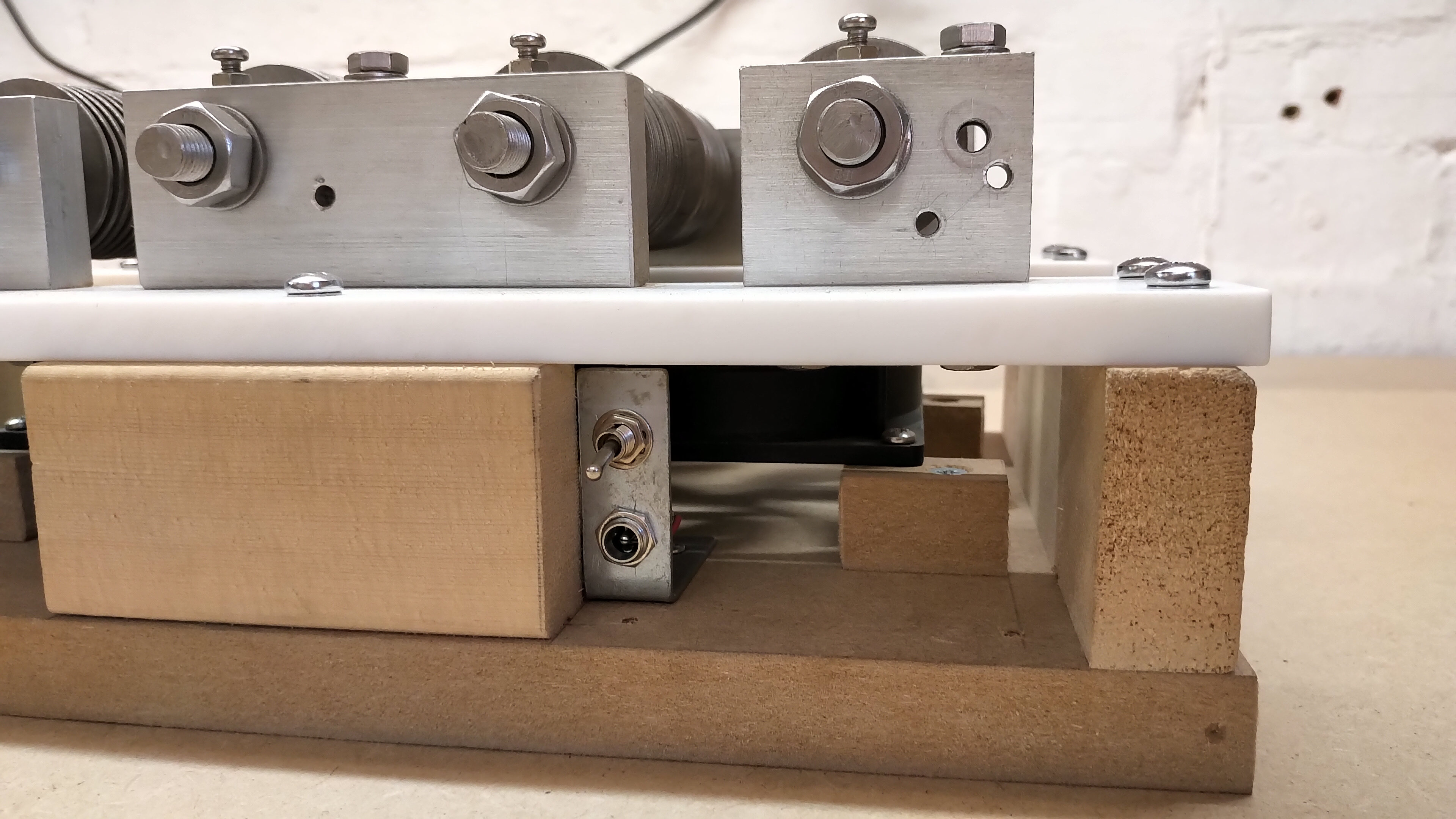
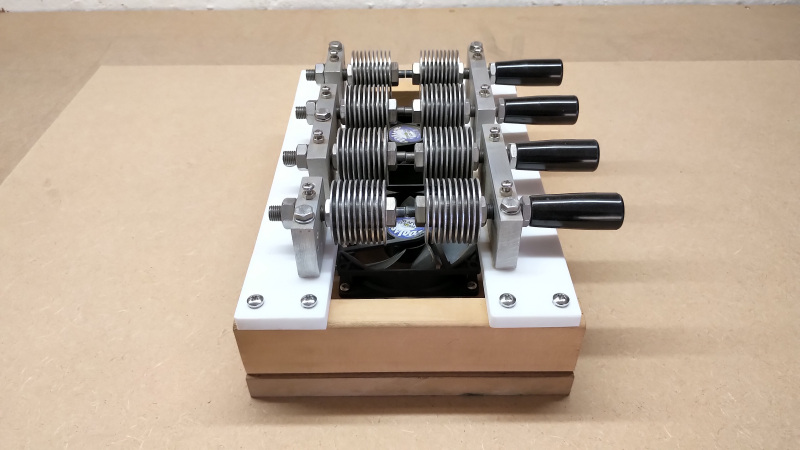
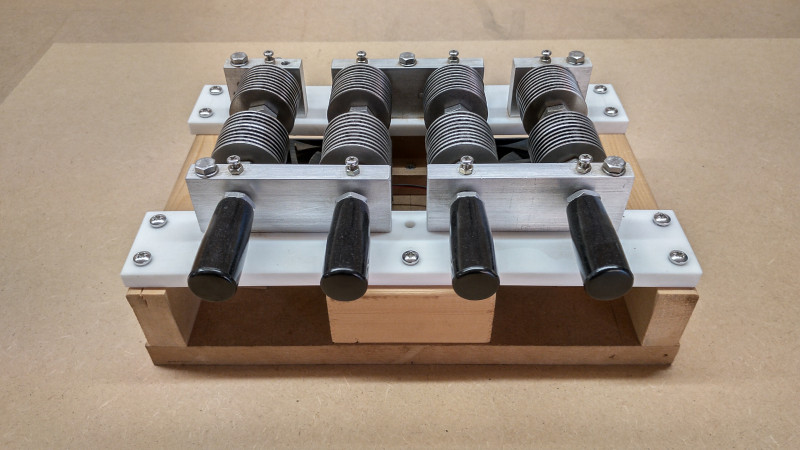
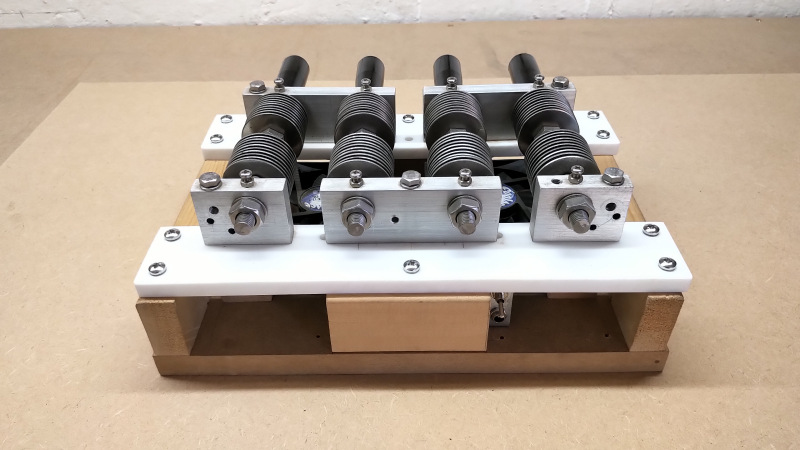
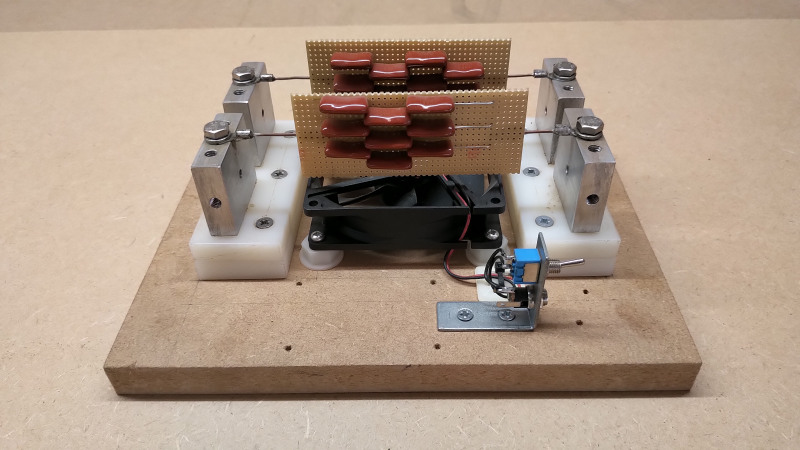
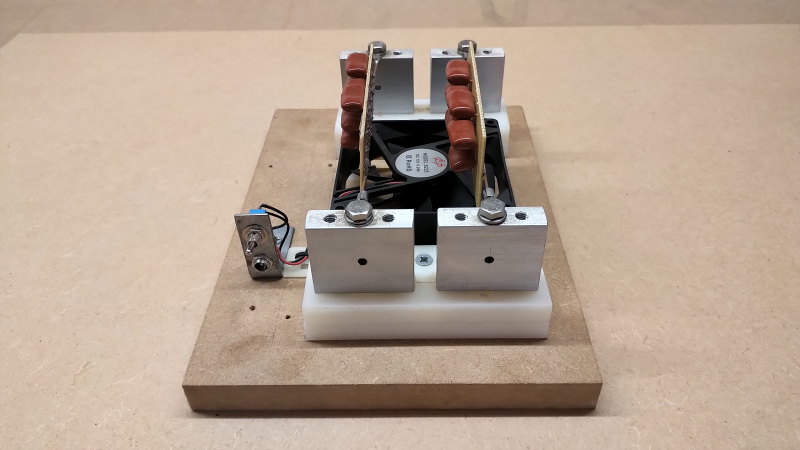
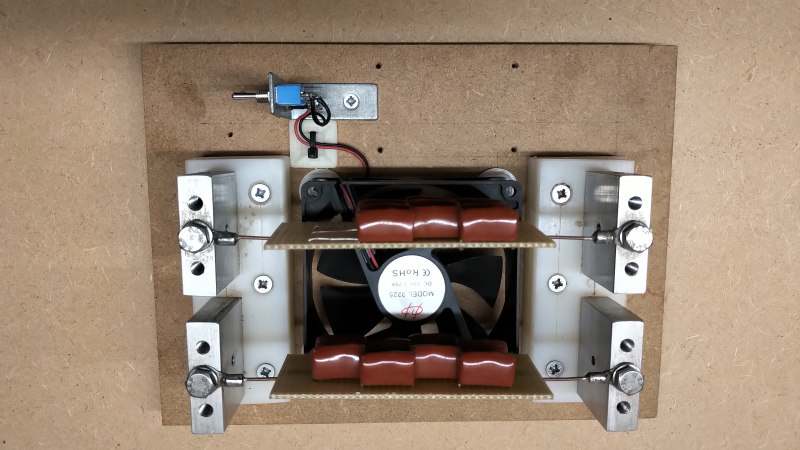
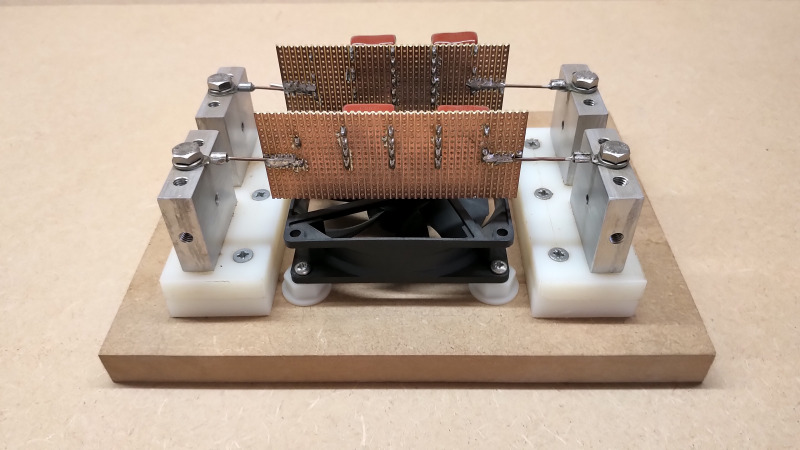
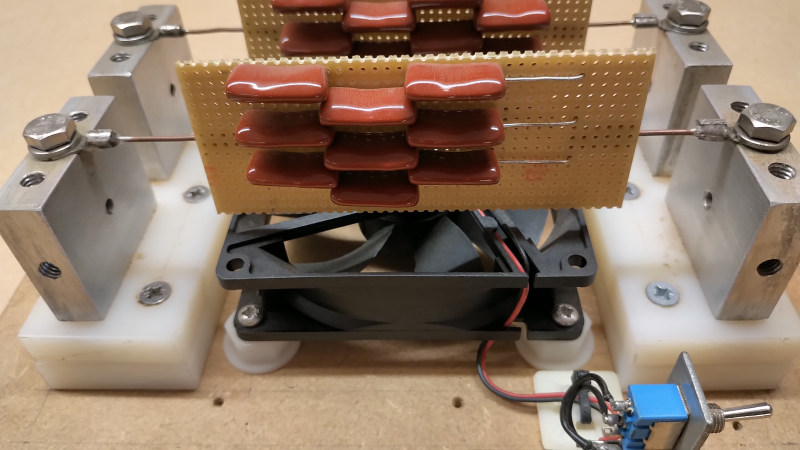
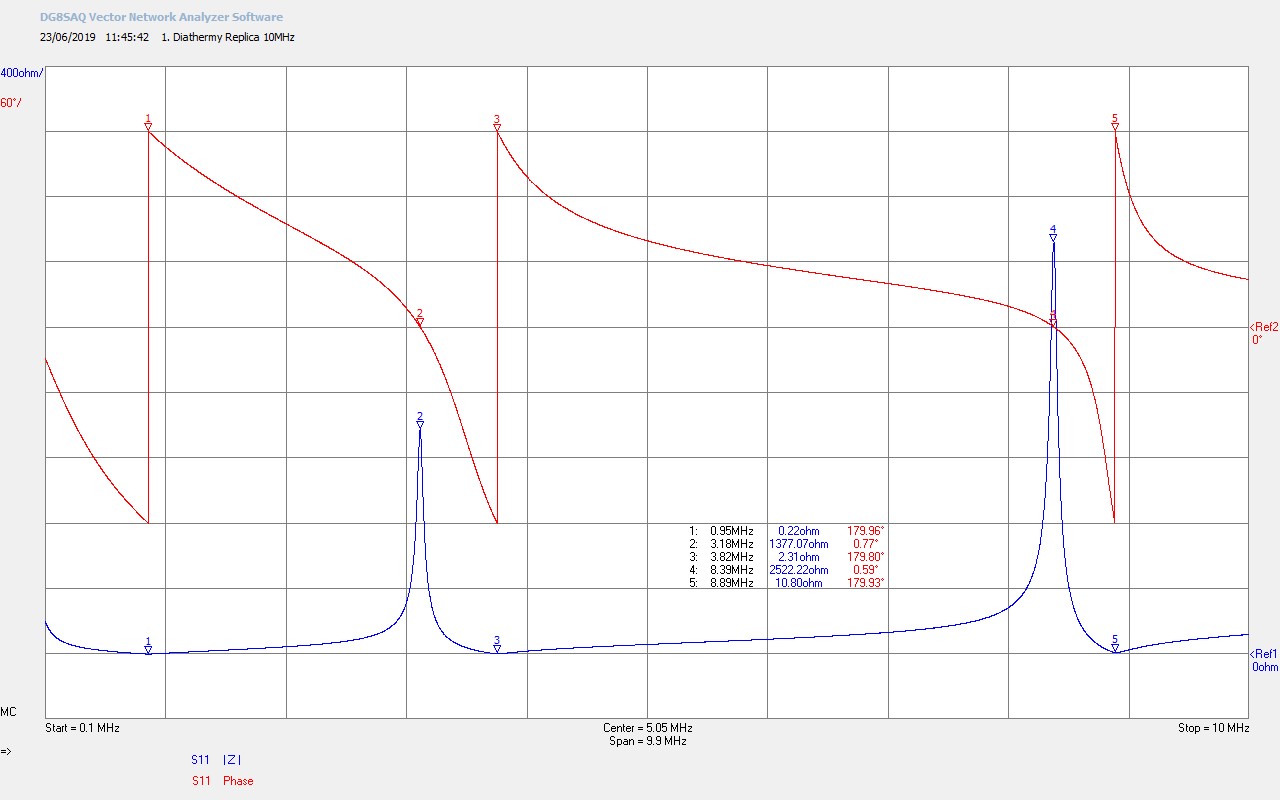
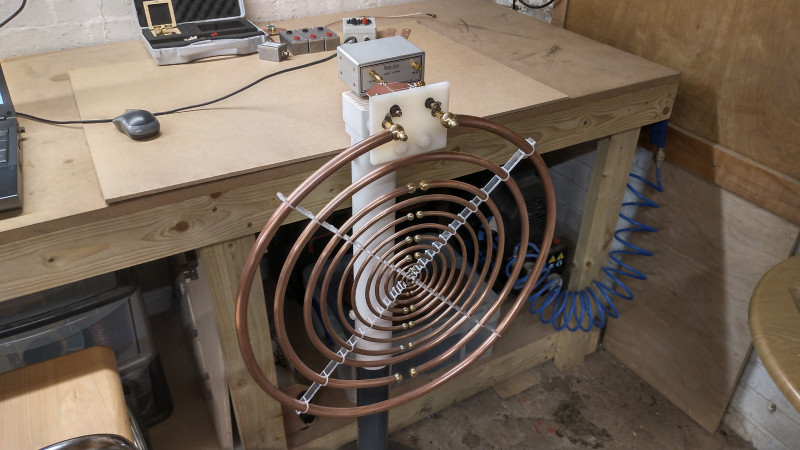
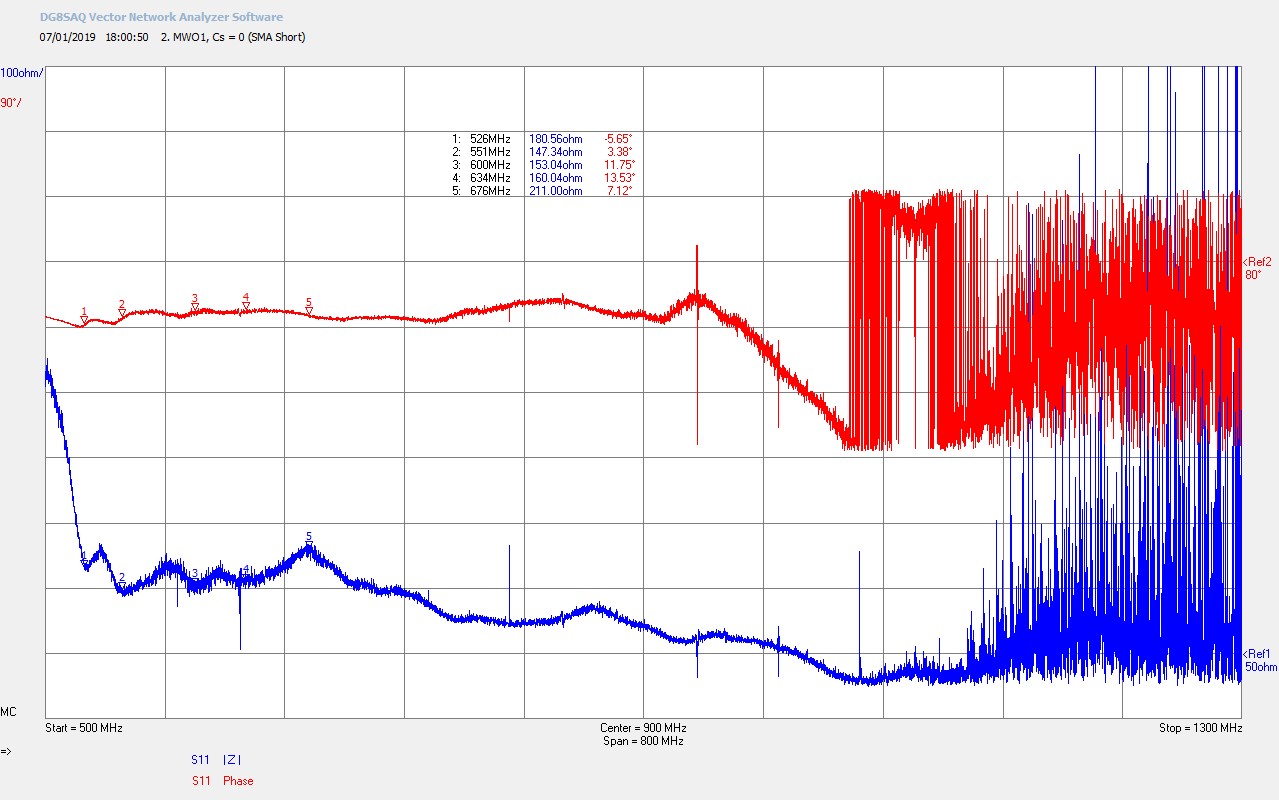
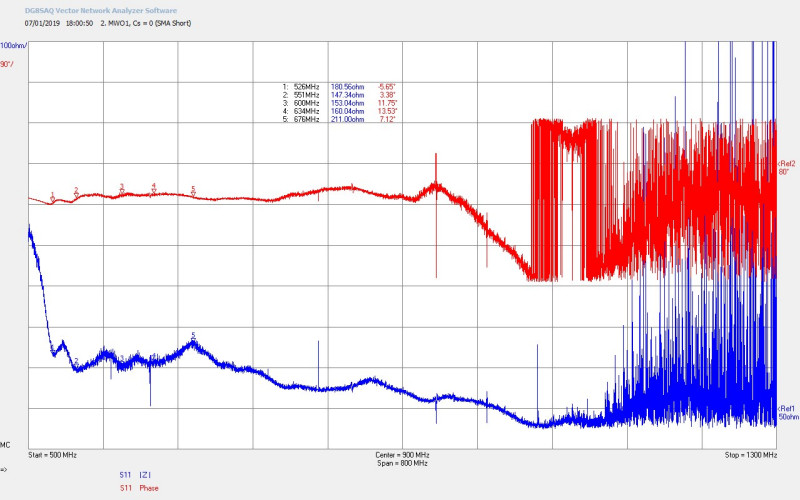
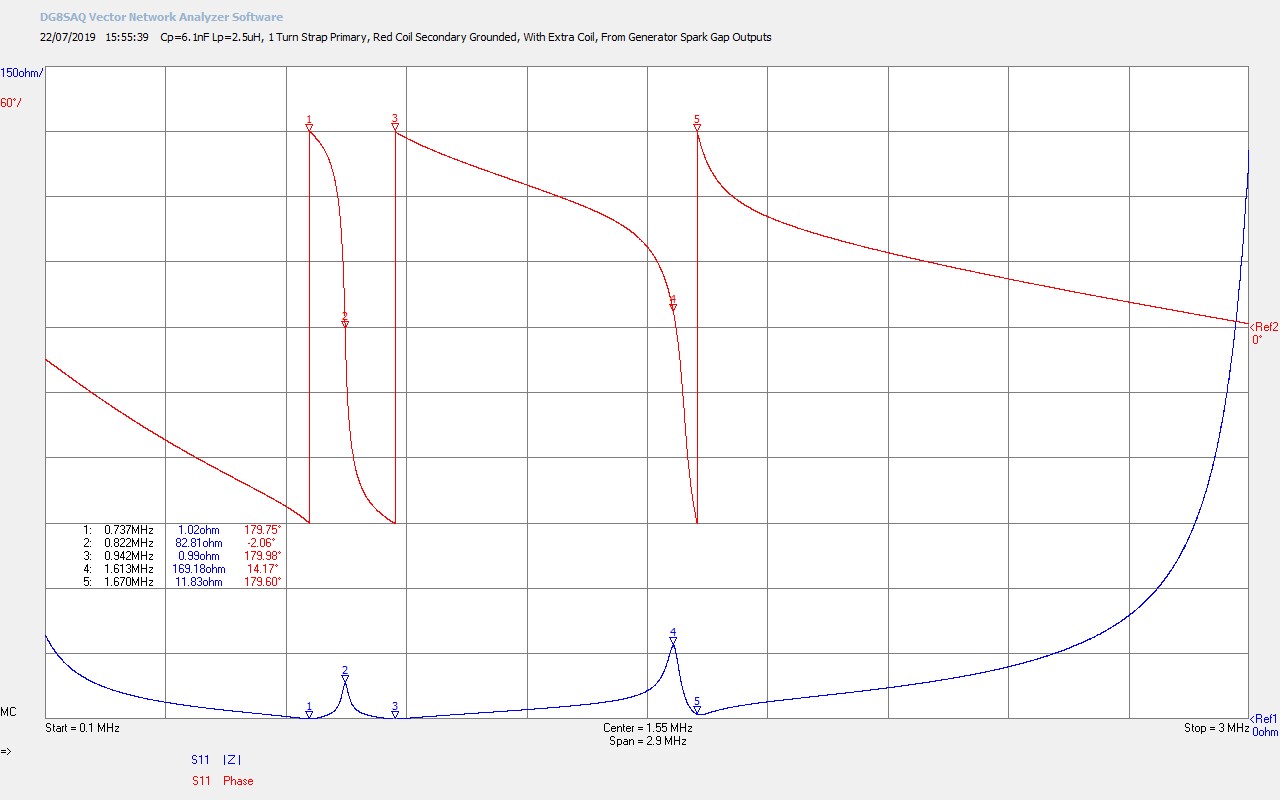
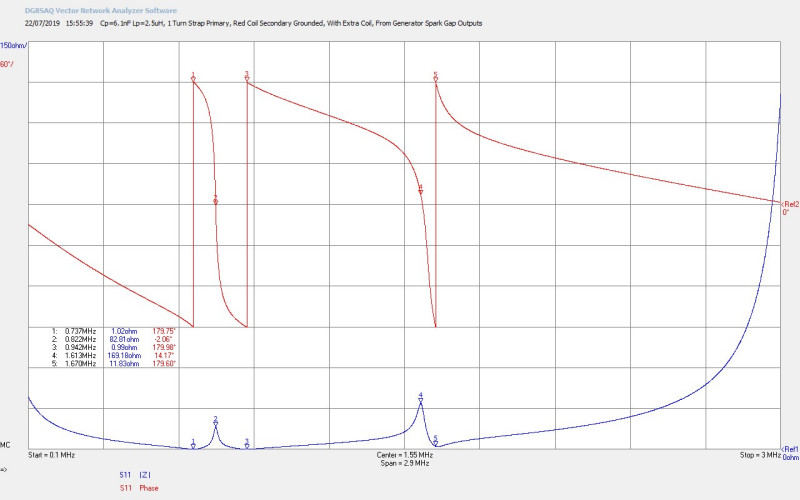
Fig 3.7. Here the single turn copper pipe primary has been replaced with a single turn copper strap, which was deemed to present a lower impedance to the generator, and improve the magnitude of the oscillating currents in the primary. In order to further improve the tuning two 22nF 3kV capacitors in parallel (44nF) were added to one of the outputs of the SGG as shown in the schematic of figure 2.2. This reduced the tank capacitance slightly from 6.1nF to 5.4nF. The inductance of the strap was measured to be 2.5uH which combined with the tank capacitance of 5.4nF provides a theoretical lumped element resonant frequency of 1370kc/s. referring back to figure 3.1 it can be seen that FS, the resonant frequency of the secondary, without the extra coil at M1 is 1326kc/s. So the primary circuit tuned and driven at this point has a very close match to the secondary coil, which ensures that maximum energy can be coupled from the primary to the secondary, and then combined with the extra coil, maximum power can be transferred from the generator to the RTC, and ultimately to the GRC when further connected. For the purposes of this endeavour this state of retune was considered adequate for further demonstration and exploration of the Colorado Springs experiment.
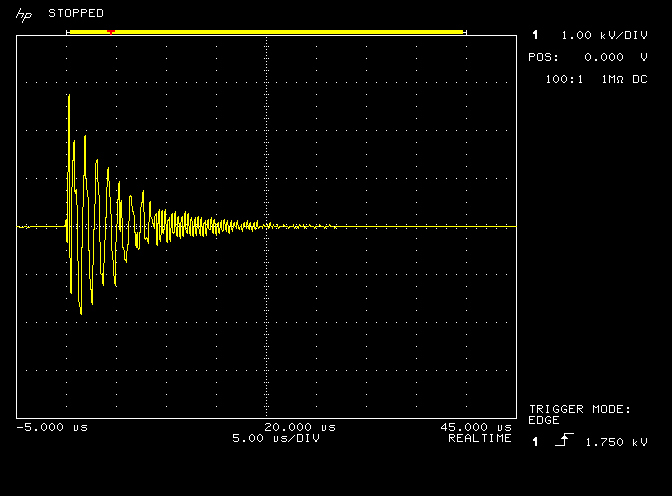
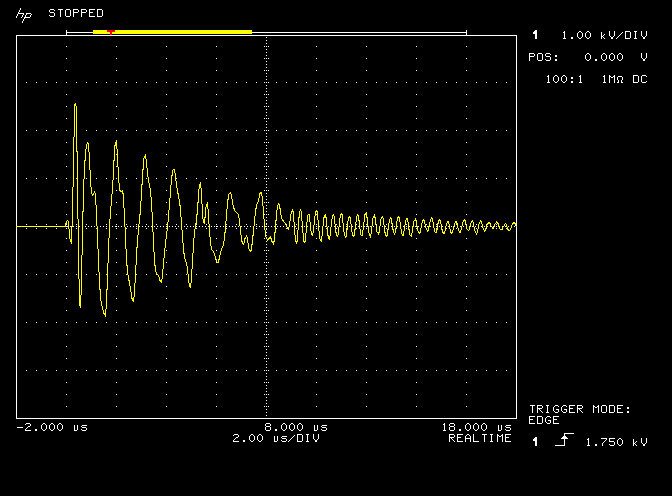
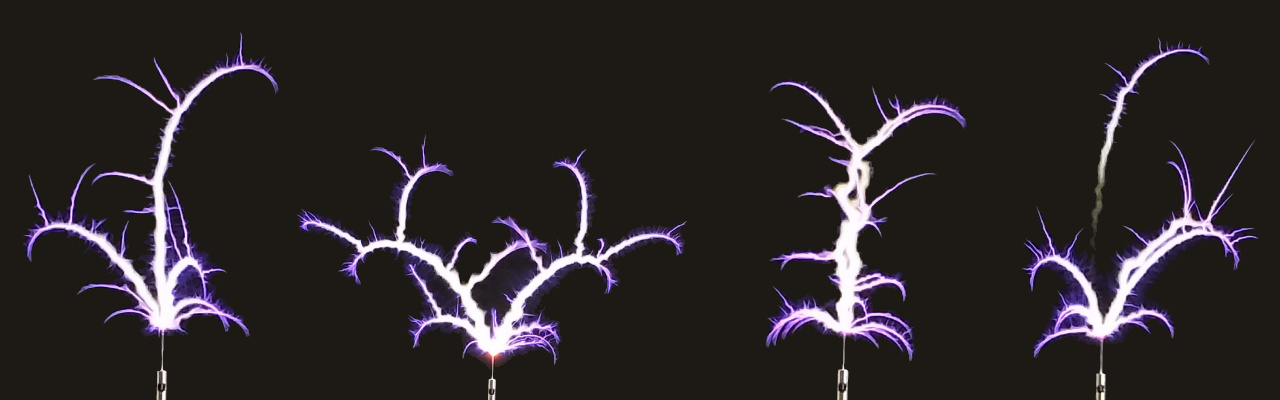
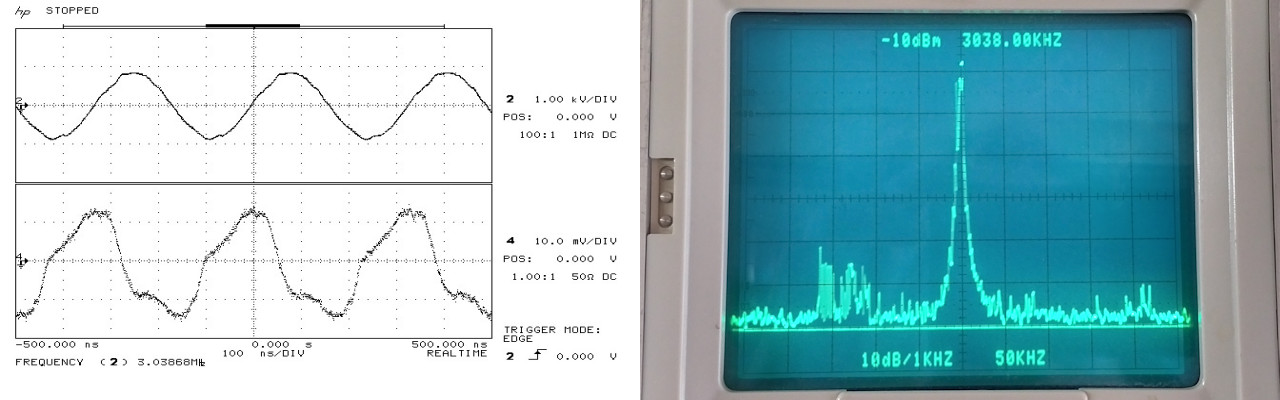
The experimental phenomena observed during the operation of the TCS experiment, retuned to work with the MWO generator, can be seen in the first video on this page.
Summary of the endeavour:
The overall endeavour facilitated the demonstration and exploration of tuning and operating the MWO spark gap generator to work with the Colorado Springs demonstration. In the process the RTC primary and secondary needed to be modified for optimum running with the SGG. Throughout the endeavour a wide range of measurements were demonstrated including:
1. Z11 impedance measurements for the series fed secondary and extra coil, for the RTC.
2. Z11 impedance measurements for the primary combined with the secondary, and the exta coil, for the RTC.
3. Combined Z11 impedance measurements for both the RTC and GRC, where the bottom ends of both secondaries were connected together to form a single wire transmission line.
4. Fine tuning of the system by adjusting the wire length of the extra coil extensions, in order to balance |Z11| in the fundamental and second harmonics.
5. Z11 impedance measurements using a computer connected vector network analyser.
The endeavour also facilitated the demonstration and exploration of the following interesting Tesla related phenomena:
6. Single wire electric power transmission.
7. Longitudinal transmission of electric power.
8. Emission of radiant energy pulses from an incandescent bulb.
9. Radiant energy pulses attracting metal to the bulb.
10. Amplification of radiant energy by interaction with a human hand.
11. Transference of electric power between a TMT “transmitter” and “receiver”.
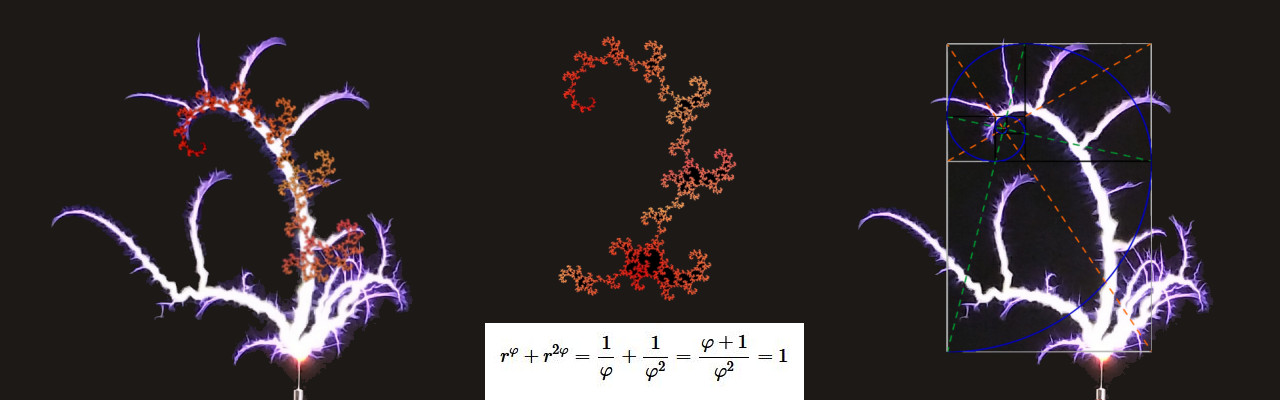
Click here to continue to the next part, ESTC 2022 – Vector Network Analysis & Golden-Ratio/Fractal-Fern Plasma Discharges.
1. ESTC 2019, Energy, Science, and Technology Conference, A & P Electronic Media , 2019, ESTC
2. Dollard E., Preview of Theory, Calculation & Operation of Colorado Springs Tesla Transformer, 2019, EricPDollard
3. A & P Electronic Media, 2019, EMediaPress
4. A & P Electronic Media, AMInnovations by Adrian Marsh, 2019, EMediaPress
5. Vril Science, Lahkovsky Multiwave Oscillator, 2019, Vril